История роботов
С древних времен человек мечтал о помощниках, которые беспрекословно выполняли бы его команды. Сегодня они существуют. Это роботы — машины, созданные делать то, что людям не под силу. Сегодня робототехника — одна из самых быстроразвивающихся и востребованных отраслей промышленности. Однако, чтобы стать таковой, ей потребовалось много времени. В 1920-х годах роботы стали появляться в научно-фантастических рассказах и фильмах, а инженеры со всего мира создавали первые механические устройства. Они могли выполнять очень ограниченное количество действий, но этого было достаточно, чтобы поразить воображение еще не искушенной публики и породить интерес к робототехнике у новых поколений. Сегодня человек сталкивается с роботами с завидной регулярностью. Они имеют разную форму и предназначение, но все призваны помогать нам. Выполнять работу по дому и исследовать океаны, проводить хирургические операции и участвовать в боевых действиях, играть и сочинять музыку, сражаться на аренах — вот неполный перечень того, что делают роботы. Они вошли в школы, больницы, лаборатории и заводы по всему миру, став неотъемлемым атрибутом прогресса.
История робототехники началась еще тысячи лет назад с создания примитивных механических кукол. Прошло много времени, прежде чем люди придумали машины, имитирующие жизнь. Первые роботизированные животные и музыканты появились для развлечения. Позже развитие электроники позволило изобретателям создать интеллектуальные устройства. Однако робот со всеми способностями настоящего человека остается пока мечтой.
Предшественники роботов
Прообразами роботов были механические машины, простые по меркам XXI века, но удивительно прогрессивные для своего времени.
Считается, что первая механическая машина, способная двигаться и выполнять действия без вмешательства человека, была создана в IV веке до нашей эры Архитом Тарентским. Механика не относилась к главным увлечениям древнегреческого математика, однако именно он смастерил механическое устройство, ставшее прообразом будущих роботов. Его деревянный голубь, движение которому придавал пар, пролетел около 200 метров.
Толчок к развитию
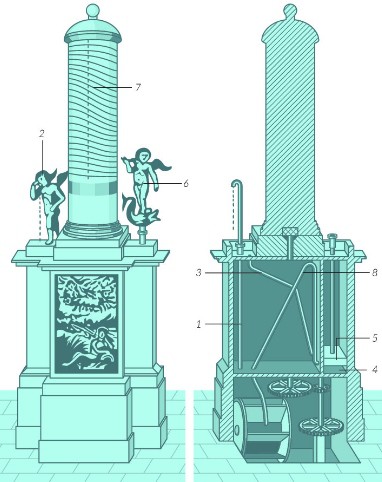
Если изобретение Архита было скорее игрушкой, то машина Ктезибия, еще одного древнегреческого механика, носила прикладной характер. Его водяные часы, созданные в конце III века до нашей эры, нельзя назвать роботом в современном понимании этого слова, однако именно они дали толчок к развитию механических устройств. На протяжении многих поколений часы Ктезибия считались самыми точными в мире, а механизм, приводящий их в действие, стал источником вдохновения для многих механиков и изобретателей.
Способ заработать
В Средние века в Европе механики впервые стали создавать механические устройства с целью заработать на них. Чаще всего это были игрушки, которые могли выполнять простейшие действия благодаря пружинам и завод ному механизму. Такие машины пользовались спросом у богачей для развлечения гостей. Наибольшее распространение получили музыкальные шкатулки, которые не только воспроизводили мелодию, но и удивляли зрителей движущимися в такт фигурками.

Однако механики и изобретатели на этом не останавливались, продолжая создавать удивительные для своего времени устройства. Так, Жак де Вокансон, открывший в 1727 году в Лионе собственную мастерскую по изготовлению механических игрушек, представил своего механического флейтиста, который мог воспроизводить 12 мелодий, при этом он действительно играл на музыкальном инструменте: вдувал воздух, шевелил губами, переставлял пальцы. В основе работы устройства лежали меха и пружины.
Азиатские куклы
Предшественники роботов стали появляться и в Азии. В XVIII веке в Японии началось производство кукол каракури-нингё. Самая известная — тяхакоби — держала в руках поднос. Если на него ставили чашку с чаем, кукла передвигалась в сторону гостя. Когда он брал чашку — кукла останавливалась, когда ставил обратно — тяхакоби разворачивалась и возвращалась на свое место.

Говорящая машина
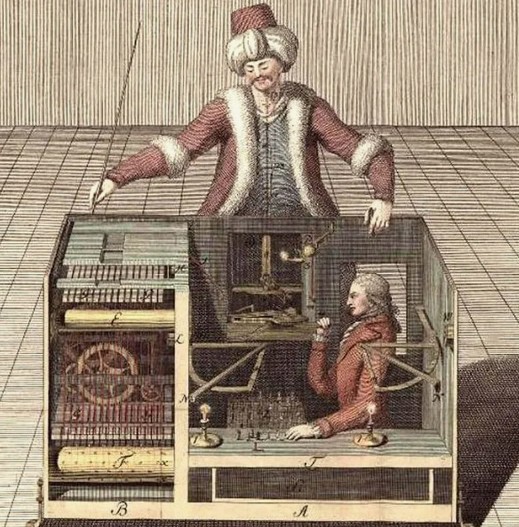
В 1788 году австриец Вольфганг фон Кемпелен продемонстрировал говорящую машину, способную воспроизводить голос трехлетнего ребенка. Устройство представляло собой деревянный ящик длиной около метра и шириной примерно 50 сантиметров, внутри которого располагалась сложная система мехов, клапанов, штифтов и прочих деталей. Однако в историю фон Кемпелен вошел как создатель другого изобретения — шахматного турка.

Прототипы роботов
Условно все устройства, которые дали толчок к развитию механики и стали предшественниками современных роботов, можно разделить на три группы. В основе их работы лежали сложные механизмы шестеренок, рычажков, пружин и прочих деталей, однако использовались конструкции для разных целей.

- Механические игрушки. Главной их целью было развлечь владельца. Как правило, выполняли ограниченное число заранее заданных действий, менять которые было нельзя. Яркий пример — музыкальные шкатулки, играющие мелодии при открытии.
- Устройства-помощники. В отличие от механических игрушек, их предназначение заключалось в выполнении полезных функций, облегчающих жизнь владельца. Например, куклы каракури-нингё.
- Автоматоны. Более сложные и крупные машины, которые часто выглядели как человек или животное. Могли выполнять свыше десятка различных задач в зависимости от выбранного режима. Практическую пользу приносили редко, но поражали воображение современников своей реалистичностью. Например, машины-«писатели».
Робототехника. Начало
Робототехника — это прикладная наука, которая занимается разработкой автоматизированных технических систем и является важнейшей технической основой интенсификации производства.
В конце XIX — первой половине XX века разработка сложных устройств, управляемых человеком либо самостоятельно выполняющих какие-либо функции, занимала многих ученых, инженеров, механиков, которые старались придумать принципиально новые механизмы.

Всемирная выставка
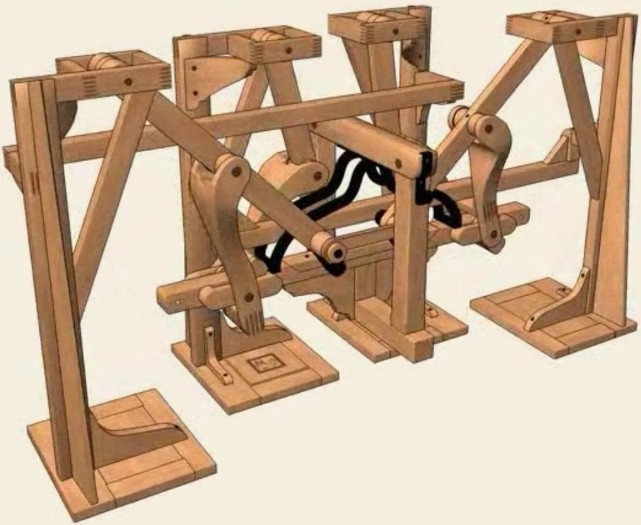
В 1851 году в лондонском Гайд-парке прошла Великая выставка промышленных работ всех народов, ставшая символом индустриализации и открытой площадкой для демонстрации технических достижений. Она способствовала развитию многих передовых технологий, в том числе и робототехники. Так, в 1878 году большой успех имела стопоходящая машина русского механика и математика Пафнутия Чебышёва — шагающее устройство, имитировавшее движения животных.
Двадцать лет спустя на Всемирной выставке Никола Тесла показал радиоуправляемую лодку, которую назвал автоматическим дьяволом (Devil automata). Ученый понимал, что изобретение может быть использовано в военных целях, а потому неохотно говорил о принципах его работы.
Пионеры
В 1927 году в Нью-Йорке инженер Рой Джеймс Уэнсли показал первого в мире робота, способного выполнять команды человека. Его назвали Мистер Телевокс. Это послужило еще одним толчком к развитию отрасли: один за другим стали появляться человекоподобные роботы. Эрик (1928) мог самостоятельно двигаться, но его главная особенность была в другом: он разговаривал и отвечал на стандартные вопросы. Естествоиспытатель (1928), первый робот Страны восходящего солнца, шевелил конечностями и стал основой будущих японских разработок. Альфа (1932) перемещался по команде, выполняя при этом до двух задач одновременно.
В 1939 году компания Westing house Electric Corporation презентовала робота по имени Электро. Он имел словарный запас в 700 слов, мог двигать руками, шевелить губами и пальцами, надувать воздушные шары, отличать красный и зеленый цвета и даже курить. Андроид управлялся голосовыми командами и мог выполнять в общей сложности 26 движений. В следующем году для Электро был сконструирован «друг» — собака-робот Спарки.


Биоморфные роботы
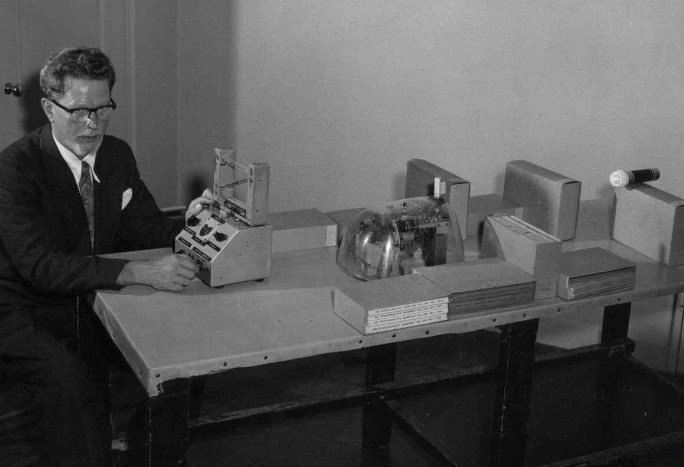
С 1948 по 1951 год английский нейрофизиолог Уильям Грей Уолтер проводил работу над созданием и совершенствованием первых биоморфных роботов, получивших название «черепашки». В дальнейшем устройства, моделирующие поведение живых организмов, стали предметом пристального внимания и изучения. Широкую известность получила мышь Клода Шеннона, находившая дорогу в лабиринте. Не менее интересными были белка Эдмунда Беркли (она собирала орехи и относила их в гнездо), электронные лисицы Барбара и Джоб (создатель — французский физик Альбер Дюкрок), черепаха Эйхлера (реагировала на свет, звук и прикосновение: одновременное воздействие двух раздражителей — тактильного и звукового — вызывало возникновение условного рефлекса).
Прототип компьютера
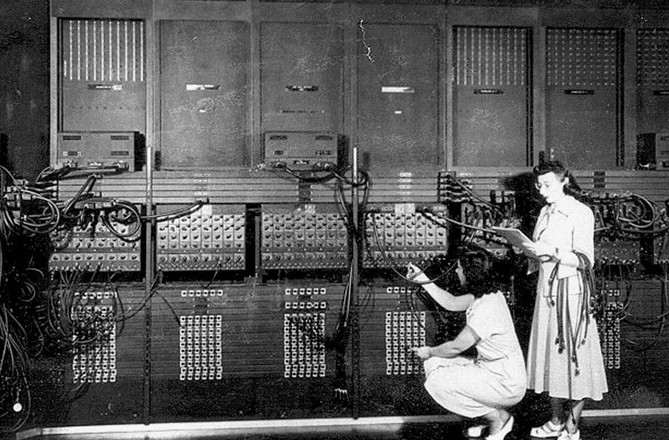
В 1943 году ученые Пенсильванского университета начали разработку первого электронного цифрового вычислителя общего назначения, который мог выполнять широкий спектр задач в зависимости от заложенной программы. Первоначально ЭНИАК (ENIAC) вел расчет таблиц стрельбы, позже производил моделирование термоядерного взрыва. В 1950 году с его помощью был сделан первый успешный прогноз погоды. ЭНИАК, по сути, стал первым компьютером широкого спектра использования.
«Черепашки» Грея Уолтера
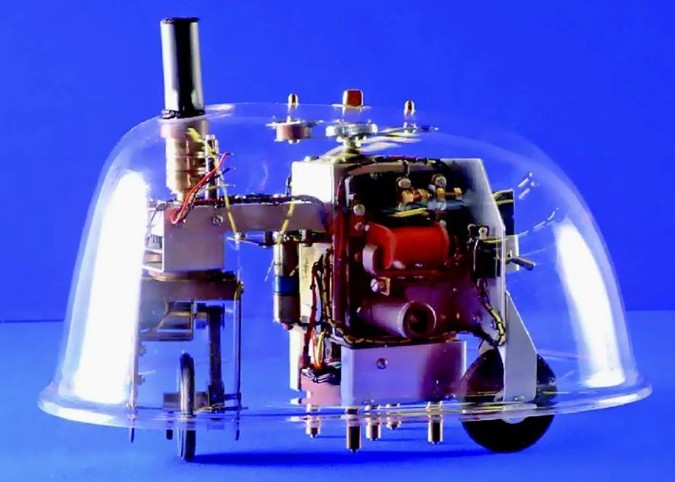
Будучи нейрофизиологом, Уильям Грей Уолтер хотел, чтобы его «черепашки» повторяли поведение животных. Отчасти ему это удалось.
Роботы Уильяма Грея Уолтера (1910–1977) получили свое название не только за внешнее сходство с одноименными животными, но и за такую же, как у черепах, медлительность действий. Объяснялась она просто: перед тем как совершить движение, «черепашки» просчитывали несколько параметров. Поведение устройств базировалось на трех состояниях: поиск света («голод»), движение в направлении источника света, избегание препятствий и слишком яркого освещения («боль»). Сам изобретатель называл их machina speculatrix.

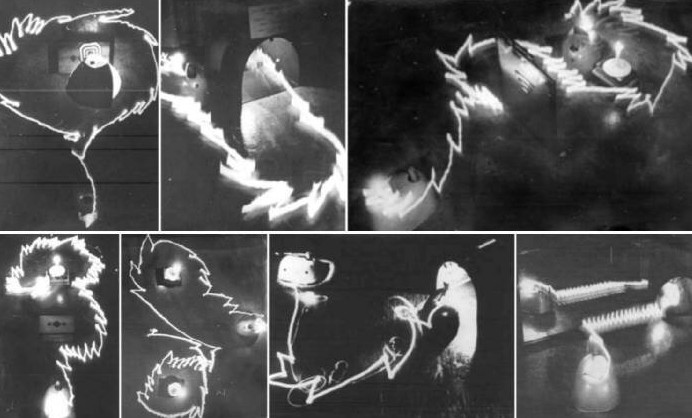
Совершенствованные модели
«Черепашки» Уолтера могли не только двигаться на свет, но и ориентироваться по слуху. В их корпус был вмонтирован микрофон, благодаря которому роботы различали звуки. Также они могли взаимодействовать: отличали себе подобных от предметов обстановки и двигались навстречу друг другу. Еще одной особенностью «черепашек» было умение выбирать наиболее яркий источник света из всех найденных. Более поздние модели Уолтер пытался научить самостоятельно находить выход из лабиринта, ориентируясь на источники света и звука, а также запоминать расположение препятствий. Они уже могли объединяться в группы для поиска лучшего источника «пищи». «Черепашки» остаются популярными среди радиолюбителей и радиотехников, их реплики появляются до сих пор.
Краткая история робототехники
Колесное транспортное средство. (≈ 3500 до н. э.)
В Месопотамии (современный Ирак) колесо приспособили для использования на транспортных средствах.
Механическая птица. (≈ 400 до н. э.)
Древнегреческий математик Архит Тарентский создал механического голубя. Деревянное устройство, двигавшееся благодаря пару, смогло пролететь около 200 метров.
Мощность пневматики. (≈ 270 до н. э.)
Древнегреческий изобретатель Ктесибий из Александрии обнаружил, что сжатый воздух может быть использован для перемещения машин.
Автоматическая музыка. (≈ 1500)
Появились первые инструменты, которые могли воспроизводить мелодии без участия человека-музыканта. Для их создания использовались пружинные механизмы.
Автоматический контроль. (≈ 1600)
Голландский инженер Корнелиус Дреббель изобрел термостат. Механическое устройство применялось для управления температурой внутри печи.
Анимационные актеры. (1725)
В Хайльбронне (Германия) создан механический театр, содержащий 119 анимированных фигур, которые исполняли пьесу о деревенской жизни.
Утка Вокансона. (1739)
Французский изобретатель Жак де Вокансон создал механическую утку, которая могла пить, есть, бить крыльями и переваривать пищу.

Калькулятор. (1820)
Французский страховой агент Томас де Кольмар изобрел первую практическую вычислительную машину, которая складывала и вычитала, умножала и делила (с трудом) числа.
Логическая алгебра. (1854)
Британский математик Джордж Буль опубликовал трактат «Исследование законов мышления, на которых основываются математические теории логики и вероятностей», в котором рассказал о логической алгебре. Позже она будет использована для проектирования компьютеров и роботов.
Роботы Чапека. (1920)
Действие пьесы чешского писателя Карела Чапека «R.U.R.» («Россумские универсальные роботы») разворачивается на фабрике, производящей роботов — искусственных людей. После публикации произведения слово «робот» стало популярным.
Законы робототехники. (1942)
Американский писатель-фантаст Айзек Азимов в рассказе «Хоровод» сформулировал три обязательных правила поведения (закона) для робота.
Современный компьютер. (1945)
Математик Джон фон Нейман создал компьютерную архитектуру, которая обеспечивает высокую гибкость и скорость работы вычислительных машин.
«Черепашки» Грея Уолтера. (1948)
Английский нейрофизиолог Уильям Грей Уолтер создал два механических робота — «черепашек»
Элмера и Элси. Несмотря на простую конструкцию, они продемонстрировали поведение, свойственное живым существам.
Тест Тьюринга. (1950)
Британский математик Алан Тьюринг сформулировал идею определения того, может ли машина мыслить. Если люди не могут понять, с кем они говорят (с человеком или компьютером), не видя собеседника, то тест считается пройденным.
Искусственный интеллект. (1956)
Американские математики Марвин Ли Минский и Джон Маккарти придумали термин «искусственный интеллект».
Нейронная сеть. (1960)
Американский исследователь Фрэнк Розенблатт применил на практике первую искусственную нейронную сеть, названную перцептроном. Перцептрон позволил понять фундаментальные законы организации, общие для всех систем обработки информации.
Промышленный робот. (1961)
Американские инженеры Джордж Девол и Джо Энгельбергер создали первых промышленных роботов под названием «Юнимейт».
Робот с искусственным интеллектом. (1966)
Шеки стал первым мобильным роботом с искусственным интеллектом: он самостоятельно выбирал направление движения и порядок действий.
Интеллектуальное зрение. (1973)
Департамент искусственного интеллекта Эдинбургского университета продемонстрировал робота по имени Freddy II, который может собрать объект, выбирая правильные компоненты.
Cyc. (1984)
Американский исследователь Дуглас Ленат, понимая, что роботы ничего не знают о реальном мире, начал проект Cyc. Его целью стало создание компьютерной базы данных, содержащей все человеческие знания.
Робот-хирург. (1985)
Первая попытка использования робота в операционной.
Genghis. (1989)
Один из первых шестиногих роботов разработан в Массачусетском технологическом институте. Каждая нога имеет по два двигателя с обратной связью для более легкой ориентации при столкновении с препятствием.
Победа над человеком. (1997)
Суперкомпьютер Deep Blue II компании IBM выиграл матч из шести партий у сильнейшего шахматиста мира Гарри Каспарова.

RoboCup. (1997)
В городе Нагоя (Япония) прошел первый футбольный турнир среди роботов RoboCup.
Honda P3. (1997)
Международная японская компания Honda представила робота-гуманоида P3 — усовершенствованную модель первого в мире автономного прямоходящего робота-андроида Honda P2, который был разработан в 1996 году и являлся предком ASIMO. Honda P3 мог ходить, подниматься по лестнице, пожимать руку и вставать с колен.
Первый киборг. (1998)
Профессор Кевин Уорвик из Университета Рединга (Великобритания) назвал себя первым киборгом в мире, поскольку у него есть микрочип, имплантированный в левую руку. Благодаря чипу доктор наук в области кибернетики открывал электронные замки и утверждал, что машины в его лаборатории реагируют на его приближение.

AIBO. (1999)
Японская транснациональная корпорация Sony выпустила первую роботизированную собаку AIBO, более совершенную, чем ранние роботы-животные, такие как Фёрби.

Робот-хирург Da Vinci. (2000)
С его помощью было проведено большое количество хирургических операций.
Космический помощник. (2001)
Разработанный в Канаде роботизированный манипулятор «Канадарм-2» начал работу на Международной космической станции.

Разведка Марса. (2003)
Марсоходы НАСА «Спирит» и «Оппортьюнити» запущены для исследования Красной планеты.
Санитары. (2004)
Американская компания Vecna Technologies представила рабочий прототип робота BEAR, предназначенного для спасательных работ на поле боя.
Самовоспроизводство. (2005)
Ученые из Корнельского университета создали самовоспроизводящихся роботов.
Беспилотные автомобили. (2014)
Google провел испытания первого беспилотного автомобиля. Позже подобные разработки начали производить практически все крупные автокомпании мира.

В чем-то роботы опередили человека. Они уже побывали на Марсе и на дне океана, передвигаются по лунной поверхности и вулканической лаве. Благодаря получаемым от машин сведениям человечество совершает большое количество открытий, которые были бы невозможны без таких помощников. Прогресс не стоит на месте. Технологии, которые еще несколько десятков лет назад казались чем-то недостижимым, сегодня стали вполне обыденными. Поэтому интересно, какие роботы появятся в будущем. Ученые, инженеры, социологи, футурологи и специалисты множества других областей работают сообща, чтобы вывести разработки роботов на принципиально новый уровень.
Роботизация Земли
Роботы давно перестали быть простой игрушкой. С каждым годом они становятся все более востребованными в промышленности: число машин, выполняющих работу, которую раньше делали люди, растет с каждым днем.
Автоматизация различных процессов актуальна в настоящее время во всем мире.
- Спрос на промышленных роботов быстрее всего растет в Азии: количество продаж ежегодно увеличивается на 15–20 %.
- Первый в мире отель, обслуживанием которого практически полностью занимаются роботы, был открыт в 2015 году в японском городе Нагасаки, после чего подобные заведения появились еще в нескольких городах страны.
- В период с 2006 по 2016 год количество промышленных роботов в мире выросло на 72 %. Количество рабочих мест на фабриках в США за это же время сократилось на 16 %.
- Около 5 миллионов рабочих мест будет потеряно к 2020 году в 15 странах с наиболее развитой экономикой. Это станет результатом развития искусственного интеллекта, робототехники и связанных с ними отраслей.


