Как роботы двигаются
Для того чтобы иметь возможность выполнять поставленные задачи, роботам необходимо двигаться.
Для перемещения у робота должно быть какое-то подобие мышц, приводящих в движение его руки и ноги. Ученые и инженеры трудятся над этим на протяжении десятилетий, непрерывно совершенствуя технологии.
Колеса или гусеницы
Один из самых простых способов заставить робота двигаться — использовать колеса или гусеницы. Снабженные подобными механизмами машины способны двигаться с достаточно большой скоростью в любом направлении. Однако есть и недостатки такого движения: в большинстве случаев оно возможно только по прямым твердым поверхностям (земля, асфальт, пол).
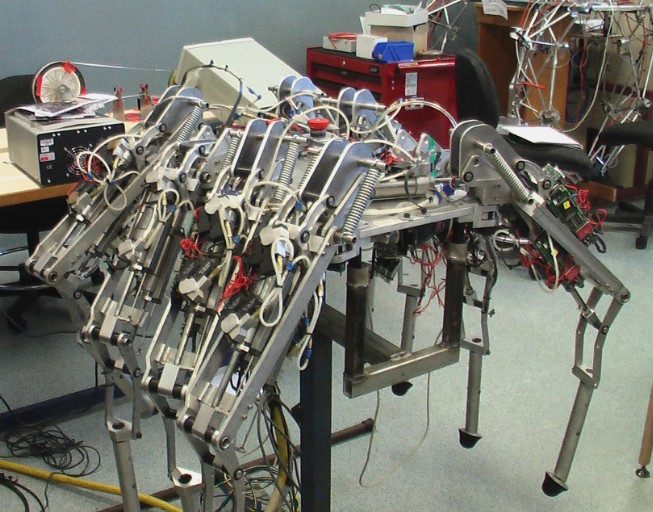
Ноги
Для роботов, используемых в более сложных условиях, созданы механизмы, которые позволяют им шагать. Машины, способные поднимать и переставлять конечности, могут выполнять задачи, недоступные колесным аналогам. Например, двигаться по лестнице вверх и вниз. Для этого нужны более сложные и, следовательно, дорогие узлы. Механика шагающих роботов требует непростой настройки, так как они могут потерять равновесие.
Все лучшее — от природы
В последние десятилетия инженеры все чаще берут за основу механизмы движения биологических видов. Роботы-рыбы, -пауки и -змеи создаются по образу своих биологических сородичей, благодаря чему могут с той же проворностью перемещаться в воде и на суше. Отработанные на таких «игрушках» механизмы в дальнейшем применяются с прикладными целями: в медицине, военном деле, для создания машин, используемых в спасательных операциях, и т. д.

Искусственные мышцы
Большинство роботов имеет гидравлическую систему, которая управляется двигателями, расположенными на узлах механизма. Эта довольно эффективная система не лишена недостатков: износ компонентов, высокая теплоотдача, необходимость профилактики. Разработка искусственных мышц позволит сделать механизмы более прочными и компактными, повысит эффективность роботов. Так, устройства, собранные с использованием первых прототипов искусственных мышц, могли поднимать больший вес и передвигаться с большей скоростью, чем их гидравлические аналоги.

Траектория движения
Для понимания того, куда двигаться, на современных роботах устанавливается сложная система различных датчиков, камер сенсоров. Считываемая с них информация обрабатывается в режиме реального времени, полученный результат сравнивается с рассчитанной ранее лучшей траекторией. Благодаря постоянной коррекции поступающих данных роботы огибают препятствия и совершают обдуманные действия даже в быстро меняющейся обстановке.

