Космические роботы
Роботизированные технологии изучения космоса ушли гораздо дальше по сравнению с теми, что применялись в «Луноходе-1» — советском роботе, который первым был спущен на поверхность небесного тела. Даже первый беспилотный космический корабль («Спутник») имел на борту полуавтоматические компоненты, хотя их возможности были весьма ограничены.

После отмены программы «Аполлон» роботы практически заменили человека на переднем крае исследования космоса. Для этого есть несколько основных причин, и первой в этом списке значится стоимость полета, особенно на фоне сегодняшнего финансового спада. Роботизированные миссии требуют меньше затрат, чем полная стоимость пилотируемой программы, несут намного меньше риска и дают гораздо более полезную, эмпирическую информацию.
В 2009 году первый индийский беспилотный лунный зонд «Чандраян-1» нашел на Луне кратеры, заполненные льдом. Этого не смогли обнаружить 12 американских астронавтов, которые фактически ходили по его поверхности, хотя стоимость их экспедиции составляла десятки миллиардов долларов. «Один маленький шаг для человека» Нила Армстронга, возможно, был символическим, но «огромный скачок для человечества» с тех пор совершили роботы.
На сегодняшний день два марсохода MER уже работают на поверхности планеты, на которую человек не сможет полететь по крайней мере еще одно десятилетие. Роботизированные устройства можно найти в различных вариантах: от спутников, орбитальных аппаратов, посадочных модулей и планетоходов до орбитальных станций, таких как Skylab, «Мир» и нынешняя Международная космическая станция (МКС).

Наиболее впечатляющими из них являются планетоходы, впервые использовавшиеся во время миссии «Аполлон-15» в 1971 году. Такие устройства, как планетоходы, в своей работе все еще полагаются на комбинацию телеметрии и программирования. Но поскольку расстояние, на которое они будут путешествовать, растет, это затрудняет получение инструкций с Земли, и важность искусственного интеллекта при создании таких автономных устройств в будущем будет только увеличиваться.
Исследование Марса
На сегодняшний день состоялось несколько миссий по изучению Марса с высадкой марсоходов. Первым был «Соджорнер», который доставили на Марс вместе со спускаемой станцией «Марс Патфайндер» в рамках программы Mars Pathfi nder. Они опустились на поверхность Марса в 1997 году и передавали данные в течение 83 марсианских суток. Второй и третий марсоходы («Оппортьюнити» и «Спирит») в рамках программы Mars Exploration Rover были доставлены на Марс с разницей в три недели в 2004 году.

«Спирит» проработал 6 лет и замолчал в 2010 году, а «Оппортьюнити» работает до сих пор, уже свыше 13 лет! Он перемещается по поверхности планеты, заезжая в кратеры и объезжая скалы, и делает множество снимков поверхности, соответствующих запрограммированным характеристикам. А в 2012 году на Марс прибыл марсоход «Кьюриосити» — целая химическая лаборатория по исследованию Красной планеты.
Американские марсоходы не первыми достигли Марса. Советский аппарат «Марс-2» разбился о поверхность планеты в 1971 году.
Марсоход «Оппортьюнити»

Марсоход «Оппортьюнити» из программы Mars Exploration Rover (MER) по-прежнему передает данные с поверхности Марса, несмотря на свою архаичную электронную начинку. Бортовой компьютер построен на 32-разрядном процессоре RAD6000 с частотой 20 МГц, 128 Мб оперативной памяти и 256 Мб флешпамяти — смешные характеристики даже для современного ноутбука.
Тем не менее, другие элементы не стареют, в том числе, изолированный аэрогелем отсек, в котором хранится ценное оборудование, работающее в условиях марсианских ночей с температурой ниже –100° C. Аналогичным образом был вооружен и второй марсоход программы MER, «Спирит», но, к сожалению, он вышел из строя в 2010 году.
Марсоход «Оппортьюнити» обязан своей долгой жизнью марсианским ветрам, которые сдувают пыль с его солнечных батарей.
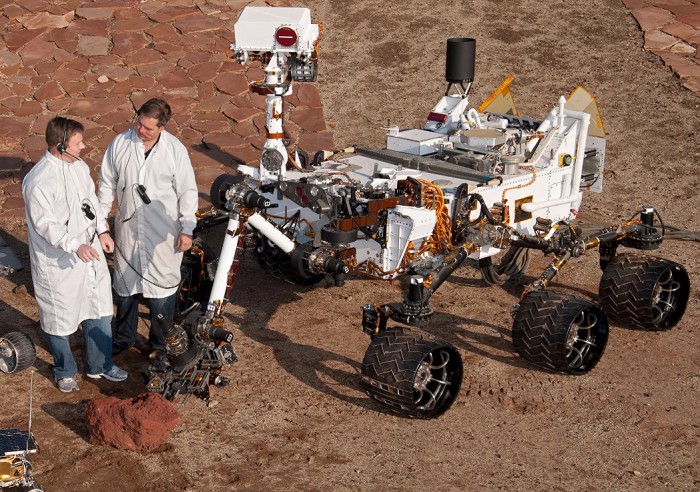
Марсоход «Кьюриосити»
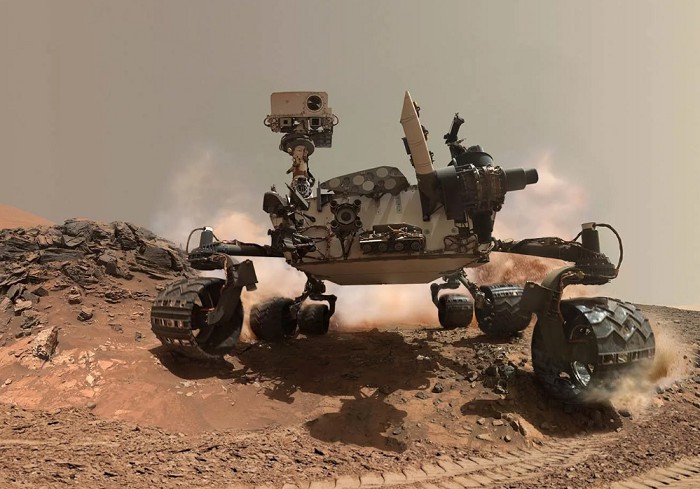
Марсианская научная лаборатория — Mars Science Laboratory (MSL) — проект стоимостью 2,3 млрд долларов, — это следующий шаг в изучении Марса после марсоходов «Спирит» и «Оппортьюнити».
В рамках этой миссии в августе 2012 года на поверхность Марса был спущен марсоход «Кьюриосити». Планировалось, что шестиколесный аппарат проведет год в поисках признаков существования жизни на Марсе, но миссия была продлена и «Кьюриосити» и по сей день путешествует по Красной планете.
Ученые приспособили инструменты рентгеновского анализа марсохода «Кьюриосити» для изучения римских рукописей из Геркуланума.
Марсоход «Соджорнер»

«Соджорнер» стал первым действительно независимым марсоходом, в значительной степени восстановившим репутацию NASA в области космических исследований, когда коснулся поверхности Марса в июле 1997 года. Хотя он проехал всего 100 м за 83 дня, это было в 12 раз больше, чем ожидалось. Он собрал огромное количество данных, включая более 8,5 миллиона атмосферных измерений и 550 изображений.
Марсоход-попрыгунчик
Британские ученые разработали проект робота, который способен передвигаться по Красной планете, совершая прыжки на расстояние более 0,8 км за раз. Марсоход Mars Geyser Hopper будет преодолевать скалистый ландшафт, перепрыгивая через препятствия.
Длина аппарата составляет 2,5 м, а вес — 1092 кг, что несколько превышает аналогичные параметры марсохода NASA «Кьюриосити». В процессе прыжка марсоход сможет подняться на высоту до 900 метров. Это будет достигаться за счет того, что сердечник радиоактивного теплового конденсатора обеспечит тягу через ракетное сопло. Двуокись углерода, которой богата марсианская атмосфера, будет сжиматься и сжижаться внутри марсохода, превращаясь в топливо.
В случае успеха марсоход-попрыгунчик позволит ускорить процесс исследования Марса, поскольку ему будет проще путешествовать по сложным ландшафтам этой планеты с ее Олимпом и другими горами, кратерами и каньонами. Колеса таких аппаратов, как «Кьюриосити», застревают на склонах и в песчаной, каменистой текстуре поверхности планеты. Марсоход-попрыгунчик будет использовать магниты, расположенные в четырехметровых ногах, позволяющих ему совершать прыжок за прыжком. Эти магниты будут создавать вихревые токи, чтобы произвести амортизирующее действие.
Первый пилотируемый полет на Марс планируется осуществить уже в 2030 году.
Предложенная специалистами компании Astrium и университета Лестера, эта концепция впервые была разработана в 2010 году. Небольшая проблема заключается в скорости сбора СО2 , при которой нынешней системе требуется несколько недель, чтобы полностью заполнить топливный бак. Тем не менее, этот аппарат бóльшую часть времени будет находиться в состоянии покоя, тщательно обыскивая поверхность Марса, так что эта проблема не должна оказаться критической.
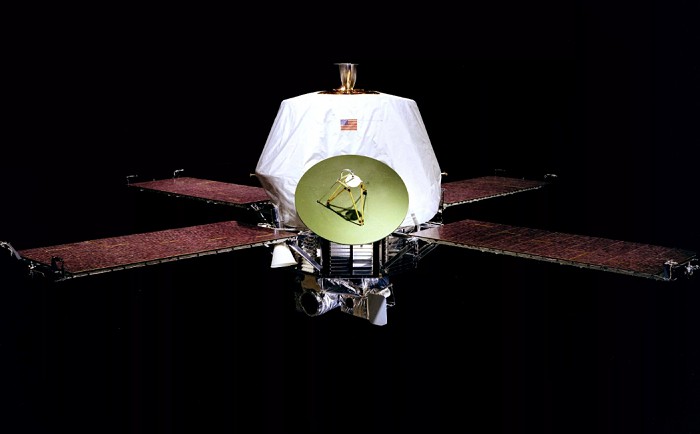
Программы изучения Марса
Первая попытка запустить корабль для исследования Марса была предпринята еще в 1960 году в СССР, но советский космический аппарат «1M» не сумел покинуть атмосферу Земли. После нескольких неудачных запусков, предпринятых США и Советским Союзом, в 1971 году аппарат NASA «Маринер-9» достиг орбиты Красной планеты. В 1975 году аппарат «Викинг-1» стал первым кораблем, успешно спустившимся на поверхность Марса. Советской станции «Марс-2» удалось достичь орбиты, но не поверхности Красной планеты, всего через несколько недель после «Маринера». Последним на сегодняшний день аппаратом является марсоход NASA «Кьюриосити», запущенный в 2011 году и исследующий поверхность Марса до сих пор. Третьей организацией, принимающей участие в исследовании, является ЕКА (Европейское космическое агентство), которое в 2003 году запустило аппараты «Марс-экспресс» и «Бигль-2». «Марс-экспресс» успешно облетел планету, а связь с модулем «Бигль-2» была потеряна после его развертывания. В 2013 году был запущен корабль NASA MAVEN, который и достиг марсианской орбиты в сентябре 2014 года. Кроме того, в 2013 году Индийская организация космических исследований (ISRO), стремясь стать четвертым космическим агентством, достигшим Красной планеты, запустила свою межпланетную станцию «Мангальян».
Экзомарс
Основная задача миссии «Экзомарс» заключается в выяснении того, существовала ли жизнь на Красной планете. Европейское космическое агентство (ЕКА) и Роскосмос вместе работают над несколькими аппаратами, которые помогут исследовать этот интересный мир более тщательно, чем раньше, а также предоставят беспрецедентные данные, касающиеся истории и современного состава планеты. Исследователи надеются, что миссия «Экзомарс» послужит основой для миссии Mars Sample Return в 2020-х годах, а также предоставит данные для миссии с участием человека, запланированной на 2030-е годы.
Старт миссии откладывался из-за многочисленных пересмотров и отмен. Аппарат «Экзомарс» изначально планировалось запустить к 2012 году, но в итоге в рамках первой миссии, «Экзомарс-2016», запуск состоялся 14 марта 2016 года ракетой-носителем «Протон-М» c космодрома Байконур. 19 октября орбитальный аппарат «Трейс Гас Орбитер» успешно вышел на орбиту спутника планеты, но мягкая посадка «Скиапарелли» на плато Меридиана не удалась — спускаемый аппарат разбился о поверхность Марса. Причины катастрофы изучаются и будут учтены при подготовке ко второму этапу миссии — «Экзомарс-2020».
Теперь мы рассмотрим машины из программы «Экзомарс» и узнаем их цели и принципы работы.
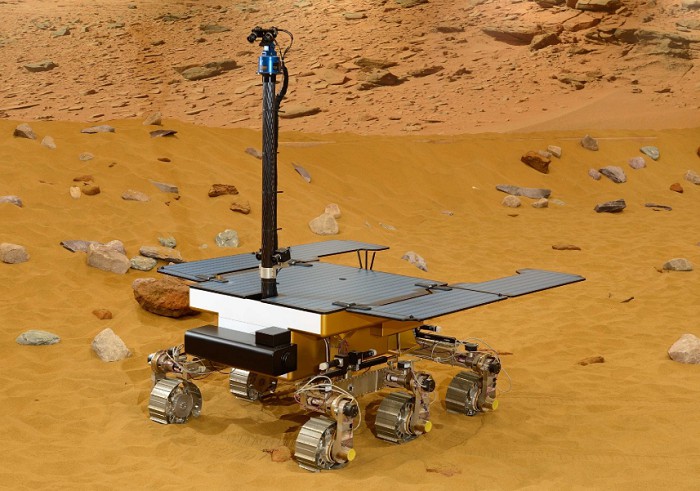
Марсоходы ЕКА
В рамках миссии «Экзомарс-2020» на поверхности Марса в одном и том же районе будут работать два аппарата — марсоход производства ЕКА и посадочная платформа, разработанная НПО им. С.А. Лавочкина. Эти аппараты прибудут в пункт назначения через девять месяцев после их запуска в апреле-мае 2020 года с космодрома «Байконур» ракетой-носителем «Протон». Оба аппарата должны спуститься на поверхность планеты в зоне с высоким потенциалом обитаемости и искать доказательства существования жизни под поверхностью.
Функцией марсохода ЕКА является подповерхностное бурение и взятие проб. Наземный контроль будет выбирать для него цели, основываясь на изображениях, полученных с установленных на борту камер, и перемещать его на расстояние в 100 м за сол (марсианский день). Шесть колес будут не только передвигать аппарат, но и регулировать его высоту и угол наклона, а гироскопы и инклинаторы помогут ему преодолевать участки мягкой почвы. Устройство для взятия проб способно пробурить скважину глубиной в 2 м для извлечения грунта и изучения подповерхностного состава. Четыре инструмента (полезная нагрузка «Пастер») будут измельчать почву в порошок и изучать ее химический и физический состав, прежде чем отправить данные обратно на Землю через орбитальный аппарат ЕКА (со скоростью 100 мегабит в сол).
Посадочная платформа, разработанная НПО им. С.А. Лавочкина, сначала будет использоваться для доставки марсохода на поверхность Марса. После спуска марсохода платформа начнет работать как долгоживущая автономная научная станция для изучения состава и свойств поверхности и атмосферы планеты. Планируемые сроки активной работы — полгода для марсохода и 1 год для посадочной платформы.
Первым аппаратом для поиска жизни на Марсе стал посадочный модуль NASA «Викинг» в 1976 году.
Орбитальный аппарат «Трейс Гас Орбитер»
Орбитальный аппарат «Трейс Гас Орбитер» отправился в путь в 2016 году и успешно достиг орбиты Марса. Основная цель аппарата заключалась в обнаружении и изучении следов таких веществ, как метан, вода, двуокись азота и ацетилен, в марсианской атмосфере. Обнаружив источник выброса газов на поверхности планеты, «Трейс Гас Орбитер» определит идеальное место для посадки платформы с марсоходом, которая прибудет в 2020 году.
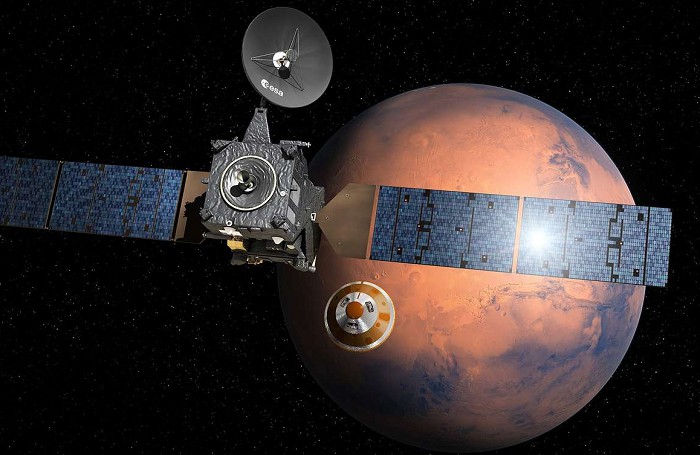
«Трейс Гас Орбитер» оборудован двухкомпонентной двигательной системой и двумя панелями солнечных батарей площадью 20 м², которые обеспечивают его питанием в 2000 Вт, в дополнение к двум модулям литийионных аккумуляторов, используемых, когда аппарату недоступен солнечный свет. Вместе эти два источника питания позволят орбитальному аппарату работать на протяжении нескольких лет. Четыре антенны обеспечат связь как с Землей, так и с другими аппаратами на поверхности Марса, а научное оборудование будет заниматься сбором данных о марсианской атмосфере.
Посадочный модуль

Одной из задач любой миссии на Марс является поиск доказательств существования жизни, однако огромная проблема связана со спуском на поверхность. Гравитация Марса составляет всего 38% гравитации Земли, а его атмосфера гораздо менее плотная. Учитывая это, посадочная платформа «Экзомарс-2020» будет снабжена ограниченным количеством научного оборудования и предназначена в основном для выполнения контролируемой посадки и безопасного и надежного спуска на поверхность. После успешного спуска и съезда марсохода с посадочной платформы, последняя станет выполнять задачи научной станции по изучению состава и свойств поверхности и атмосферы планеты.
Луноходы
Луноход был самым обсуждаемым устройством на Земле до появления марсоходов.
Хотя луноходы кажутся едва ли сложнее гольф-каров по сравнению с сегодняшними марсоходами, влияние их было огромным. С их помощью астронавты перемещались и перевозили оборудование намного дальше, чем это было возможно пешком, и привозили образцы горных пород, которые астронавты миссий «Аполлон 15–17» позже доставили на Землю.

Впервые луноход был использован в миссии «Аполлон-15» в 1971 году. Стоимость четырех построенных луноходов составила 38 миллионов долларов (около 200 миллионов долларов по сегодняшнему курсу). Луноходы приводились в действие двумя 36-вольтными неперезаряжаемыми батареями и обладали максимальной скоростью в 12,88 км/ч, хотя рекорд скорости передвижения по Луне, который установил астронавт Юджин Сернан, все еще не побит — 18,02 км/ч. Все три лунохода остались на поверхности Луны после того, как их миссия завершилась.
Луноходы 1 и 2
«Аполлон» хоть и доставил Армстронга на Луну, но эталоном робототехники был «Луноход».
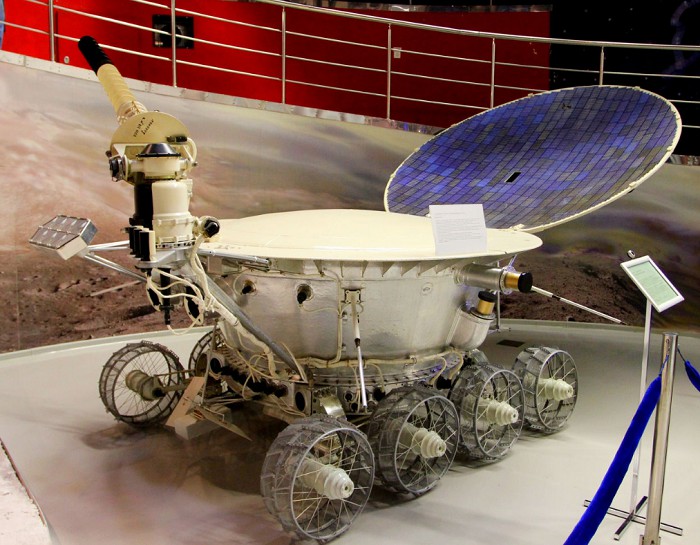
«Луноход-1» был первым беспилотным транспортным средством, спустившимся на поверхность Луны в 1970 году. Созданный советскими конструкторами, управляемый луноход был хорошо оснащен по всей длине корпуса, составляющей с открытой солнечной батареей 4,42 м. В оборудование входили две телевизионные камеры (одна резервная), четыре панорамных телефотометра, рентгеновский флуоресцентный спектрометр и рентгеновский телескоп, детектор радиации, одометр-пенетрометр и даже простой лазерный рефлектор. Луноход получал электропитание от перезаряжаемых солнечных батарей и имел коническую антенну для получения телеметрических данных. Он превысил время своей миссии, прослужив почти 301 сутки и проехав свыше 10 км, выполнив за это время многочисленные исследования грунта и передав более 200 панорам и свыше 20 000 снимков поверхности.
В 1970 году «Луноход-1» стал первым беспилотным транспортным средством, спустившимся на поверхность космического объекта.
В 1973 году за ним последовал усовершенствованный «Луноход-2» похожей конструкции, оборудованный восемью колесами, солнечной батареей, оснащенный тремя телевизионными камерами, приборами для изучения механических характеристик грунта и солнечного излучения, астрофотометром для измерения уровня видимого и ультрафиолетового света, магнитометром, радиометром и лазерным фотоприемником. Его миссия длилась почти четыре месяца, прежде чем «Луноход-2» перегрелся. За это время он преодолел 37 км и отправил 86 панорам и около 80 000 кадров телесъемки.
Поприветствуем «Атлета»
В настоящее время компанией Jet Propulsion Laboratory (JPL) разрабатывается «Атлет» — планетоход следующего поколения. Больше, быстрее и универсальнее, чем уже имеющиеся модели.
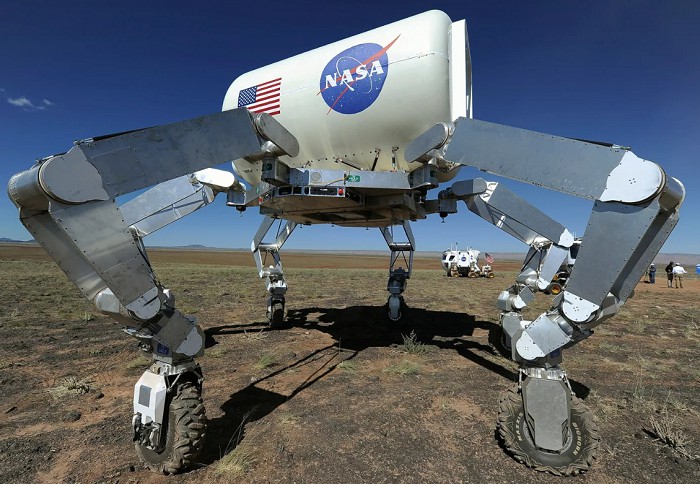
Внешний вид «Атлета» впечатляет. Размером с небольшой автомобиль, он похож на огромного паука с телом в виде центральной базы и шестью выдвижными ногами, каждая из которых заканчивается колесом. Такая конструкция позволяет «Атлету» перемещаться по различным ландшафтам.
В будущем планируется оснастить робота функцией распознавания голоса или жестов для контроля со стороны космонавта и багром, чтобы втаскивать аппарат по вертикальным склонам. Модульная конструкция «Атлета» позволяет выполнять стыковку с другими аппаратами, включая заправочные станции и оборудование для выемки грунта. Аппарат может взять на борт 2,3 тонны полезного груза, что превращает его в мощную рабочую лошадку.
Нынешний экономический спад темными тучами сокращения финансирования навис над «Атлетом», и это ставит под угрозу всю стратегию по «возвращению человека на Луну», ради которой он был разработан.
Дистанционно управляемая система манипулирования «Канадарм»
Дистанционно управляемые системы манипулирования разрабатываются с пятидесятых годов, но только в 1975 году они получили собственное название. «Канадарм» стал одновременно и национальной инженерной гордостью страны, которая спроектировала и построила его (Канада), и самым узнаваемым и многофункциональным инструментом на кораблях «Спейс шаттл».
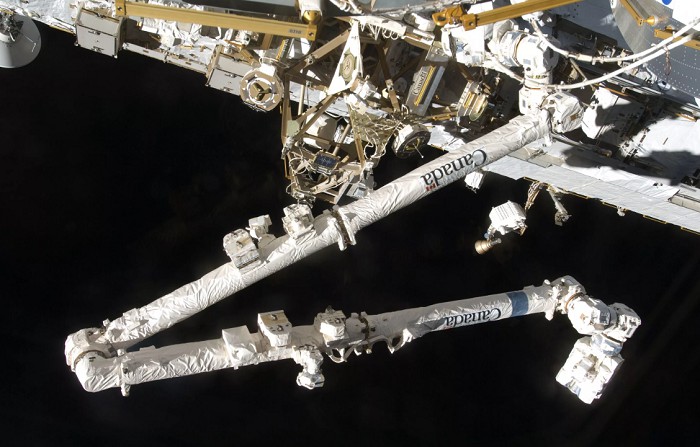
«Дистанционно управляемая система манипулирования Шаттла» (таково его настоящее название) — это 15-метровый рычаг, способный поднимать грузы и манипулировать ими с небольшой скоростью, но достаточно точно. Он широко использовался в миссиях «Спейс шаттл» для различных целей, включая перевозку грузов, сбивание льда с фюзеляжа и выполнение базового ремонта космического телескопа «Хаббл». «Канадарм» всегда функционировал без сбоев. Его преемник, «Канадарм2», работает в составе МКС и используется для перемещения грузов массой до 116 000 кг. Это устройство применяется также для удержания космонавтов и инструментов при работе в открытом космосе.
Человекоподобные роботы
Когда первоначальный вариант «Робонавта» был представлен в Космическом центре имени Линдона Джонсона в 1996 году, его конструкция, напоминающая Давроса — персонажа британского сериала «Доктор Кто», — создавала впечатление ненадежности. Как устройство на фиксированном колесном шасси может оказать реальную помощь в условиях открытого космоса? Ответом стал «Робонавт 2», разработанный Космическим центром имени Линдона Джонсона и компанией General Motors.
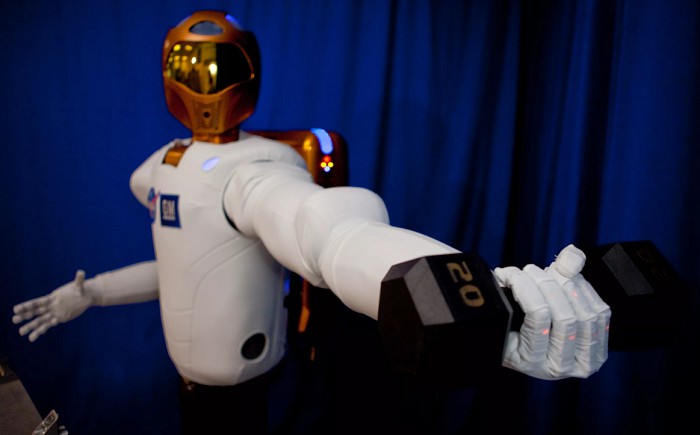
«Робонавт 2» оборудован передовыми датчиками и видеотехнологиями, чтобы он мог делать гораздо больше, чем просто поднимать и перемещать объекты, как «Канадарм». Нужно ли провести ремонт на МКС, обслужить базовую станцию, предназначенную для высадки на планету, или выполнить опасные работы в автомобильной и авиационной промышленности, «Робонавт 2» справится с любой задачей, используя для этого подходящее дополнительное оборудование.
Как роботы-гекконы помогают в космосе
В настоящее время в космосе текстильная застежка (или просто «липучка») — предпочтительный метод крепления оборудования к стенам Международной космической станции в условиях микрогравитации. Тем не менее у этого метода есть существенный недостаток — необходимость в подходящей для приклеивания поверхности, поэтому NASA вновь обратилось к природе, чтобы найти более удачную альтернативу.

На основе результатов изучения лапок гекконов инженеры NASA разработали якоря, которые могут цепляться почти за любую поверхность, не оставляя на ней следов и не ослабляя крепление с течением времени. Способ применим даже в условиях экстремальных температур, давления и излучения, поэтому вакуум не станет проблемой. Связывающий слой якоря содержит крошечные синтетические волоски, намного тоньше человеческих, которые при приложении веса создают вандерваальсовы силы — тот же метод, который используют гекконы. Якоря уже были протестированы в условиях микрогравитации и показали, что метод позволяет удерживать человека весом 100 кг.
В настоящее время изобретение применяется для создания лазающего робота с липкими ножками, который может использоваться для осмотра и ремонта внешней поверхности МКС. Сотрудники NASA даже надеются, что в один прекрасный день эта технология может быть использована для сбора крупных предметов космического мусора и наведению порядка на орбите.
Лапки-прилипалы геккона

Геккон — один из величайших природных альпинистов, поскольку может удержаться практически на любой поверхности и даже на потолке. Секрет их «прилипчивости» заключается в миллионах крошечных волосков на лапках и физических законах. Каждый микроскопический волосок содержит молекулы с положительно и отрицательно заряженными частями, и когда эти молекулы контактируют с другой поверхностью, они притягиваются к противоположным зарядам на этой поверхности, образуя вандерваальсовы силы. Когда геккон переносит свой вес на «прилипшую» лапку, волоски сгибаются и силы притяжения увеличиваются, а на лапке, на которую больше не давит вес, волоски распрямляются, и геккон может ее «отлепить».
Космические технологии будущего на Титане
Миссия Titan Aerial Daughtercraft была предложена в рамках программы Innovative Advanced Concepts (NIAC) агентства NASA с целью отправки небольшого квадрокоптера на Титан вместе с кораблем-носителем. Этот беспилотный летательный аппарат предназначен для того, чтобы работать над поверхностью спутника, при необходимости опускаясь на поверхность для взятия проб. Когда заряд аккумулятора беспилотника закончится, он сможет вернуться к кораблю-носителю, подзарядиться, а затем продолжить свою миссию.
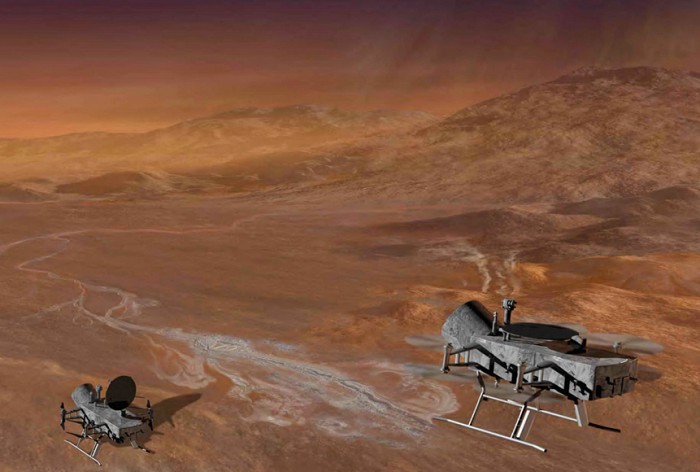
В отличие от марсоходов, этот беспилотник предназначен для работы в автономном режиме. Он может собирать образцы для исследования на протяжении нескольких дней, прежде чем передать информацию на Землю с помощью корабля-носителя. На данный момент точная дата отправки миссии на Титан не определена, однако интерес, вызванный зондом «Гюйгенс», без сомнения, поспособствует ее реализации.
В октябре 2018 года должна стартовать миссия BepiColombo к Меркурию через Венеру.
Подводная миссия

Море Кракена является самым крупным из известных морей на Титане. Ученые заинтересованы в изучении этого гигантского водоема, ширина которого, согласно оценкам, составляет более 1000 км, а глубина — около 300 м. В рамках программы NIAC было предложено использовать автономную подводную лодку, которая могла бы исследовать углеводородные моря, пока беспилотный летательный аппарат сканирует поверхность спутника. Основной целью является тщательное изучение состава жидкости. Кроме того, подводная лодка будет искать признаки растительной или микробной жизни, которые могут скрываться глубоко под поверхностью моря. Эти данные затем будут переданы на Землю через корабль-носитель, когда подводная лодка вернется на поверхность.
Беспилотные космические зонды
4октября 1957 года Советский Союз успешно запустил первый в мире космический зонд, «Спутник-1», положивший начало космической гонке между Россией и США. В первые десять лет усилия человека, направленные на проведение научных экспериментов в космосе, в основном заканчивались неудачами, успехов удалось добиться только в конце 1960-х годов. Многие проблемы были связаны с неудачным запуском, а кроме того, большинство зондов не были способны выдерживать суровые реалии космического пространства.
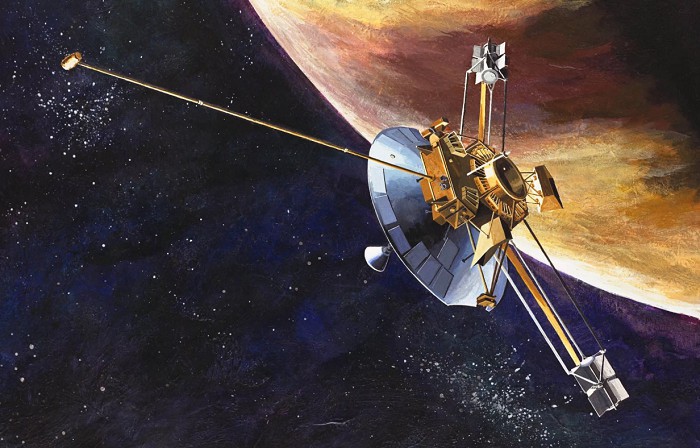
Выдерживать экстремальные температуры — это серьезная задача сама по себе. Конечно, проблему для зондов, которым нужно опуститься на поверхность в чуждых им условиях, представляет не только температура — они должны противостоять интенсивному излучению и давлению с его колебаниями от чистого вакуума до значений в 90 и более раз выше, чем на поверхности Земли. В 1970 году советский зонд «Венера-7» успешно спустился на поверхность Венеры и отправлял данные на Землю в течение примерно 20 минут, пока его не расплющило огромным давлением.
Космические зонды не только должны выступать в качестве высокочувствительных научных инструментов, но и иметь более жесткую и прочную конструкцию, чем самый крепкий черный ящик. Поэтому дизайн подавляющего большинства космических зондов направлен на поддержку их самих и защиту критически важных для осуществления их миссии систем. В конечном счете в процессе создания зондов производители учитывают четыре области науки. Инжиниринг (обеспечение самодостаточности), обнаружение полей и частиц (например, для измерения магнетизма), зондирование (для конкретных практических научных экспериментов) и дистанционное обнаружение, которое среди всего прочего обычно предполагает использование спектрометров, фотодетекторов и инфракрасных устройств.
Роботы-компаньоны для астронавтов
В космосе трудно избежать ощущения одиночества. Космонавтам, подолгу находящимся на Международной космической станции (МКС), часто приходится с ним бороться. Иногда они сталкиваются с более серьезными психологическими проблемами, чем те, которые вызваны жизнью в условиях микрогравитации или сном в вертикальном положении.

Для борьбы с ними японские ученые разработали робота для психологической поддержки. Его название, Kirobo, является производным от японского слова «kibo» («надежда») и «robot» («робот»). Рост этого робота составляет 34 см, а вес — 1 кг. Робот оборудован интеллектуальной системой распознавания голоса, способен составлять собственные предложения с помощью сложной системы обработки языка, а также обладает встроенной программой синтезирования речи.
Эти инновационные системы фактически были разработаны компанией Toyota, которая планирует использовать данные технологии для развития разговорных способностей других роботов. Эксперимент «Киробо» также был направлен на изучение того, как люди и роботы могут сосуществовать друг с другом во время возможных будущих длительных космических полетов. Робот «Киробо» вернулся на Землю после 18-месячного пребывания на борту МКС.
Автоматические грузовые корабли
Как европейскому кораблю снабжения удается поддерживать МКС полностью укомплектованной?
Автоматический грузовой корабль (АГК) Европейского космического агентства (ЕКА) представляет собой беспилотный космический аппарат, разработанный для доставки грузов и предметов снабжения на Международную космическую станцию (МКС), после чего он отсоединяется и сгорает в атмосфере Земли. Эти аппараты крайне важны для поддержания человеческого присутствия на МКС, они доставляют такие жизненно важные для экипажа припасы, как вода, продукты питания и кислород, а также новое оборудование и инструменты для проведения экспериментов и общего обслуживания станции.

Первым был запущен корабль «Жюль Верн» в 2008 году; он был назван в честь известного французского писателя XIX века, автора книги «Вокруг света за 80 дней». В феврале 2011 года был запущен «Иоганн Кеплер» (названный в честь астронома), за которым в 2012 и 2013 годах последовали «Эдоардо Амальди» и «Альберт Эйнштейн», соответственно (названные в честь физиков). Миссия первого корабля несколько отличалась от следующих, поскольку являлась первой в своем роде, организованной Европейским космическим агентством, поэтому предполагала проведение различных дополнительных процедур, вроде тестирования способности грузового корабля маневрировать в непосредственной близости от МКС в течение нескольких дней, чтобы предотвратить повреждение станции при стыковке. Тем не менее по большей части все миссии АГК были и будут одинаковыми.
Автоматические грузовые корабли запускаются в космос с помощью тяжелой ракеты-носителя «Ариан-5» в разных модификациях. Спустя чуть более часа после старта ракета направляет АГК в сторону МКС и отталкивает его. Время в пути до станции после отделения от ракеты занимает около десяти дней.
АГК является многофункциональным аппаратом — это означает, что он представляет собой полностью автоматическое транспортное средство, которое, будучи прикрепленным к МКС, отвечает необходимым требованиям безопасности для перевозки космонавтов. Приблизительно 60% АГК занимает универсальная грузовая конструкция (УГК). Она подсоединяется к сервисному модулю, который отвечает за приведение аппарата в движение и его маневрирование. УГК может доставлять на МКС до 7,7 тонны сухих и жидких грузов, причем к первым относится оборудование и личные вещи, а к последним — топливо и вода для станции.
К 2020 году Европейское космическое агентство планирует усовершенствовать автоматический грузовой корабль, превратив его в корабль для транспортировки космонавтов.
Кроме доставки припасов, АГК выводит МКС на более высокую орбиту, поскольку с течением времени станция опускается к Земле из-за сопротивления атмосферы. Для поднятия МКС АГК на протяжении 10–45 дней сжигает около четырех тонн собственного топлива, медленно подталкивая станцию вверх.
Наконец, АГК используется в качестве средства для удаления отходов. После изъятия из аппарата полезного груза он максимально заполняется отходами с МКС. Затем АГК отстыковывается от станции и сгорает в атмосфере.
Другие аппараты снабжения
Автоматический грузовой корабль ЕКА — не единственный космический аппарат, способный снабжать МКС всем необходимым. С момента начала его эксплуатации еще три класса космических аппаратов использовались для доставки груза на станцию, находящуюся на высоте в 400 километров над поверхностью Земли. Дольше всего применялся российский корабль снабжения «Прогресс», который в период с 1978 года и по настоящее время выполнил более 100 полетов на российские космические станции «Салют-6», «Салют-7» и «Мир», а также на МКС.
«Прогресс» сменил многоцелевой модуль материально-технического снабжения (ММС) итальянского производства, который на самом деле доставлялся внутри челнока «Спейс шаттл» агентства NASA и извлекался после стыковки космического челнока со станцией. ММС доставлялись на МКС 12 раз, но, в отличие от АГК, они возвращались на Землю внутри «Шаттла » после завершения каждой миссии. Тем не менее между АГК и ММС существует сходство, например, герметичный грузовой отсек, практически одинаковый в обоих аппаратах.
В Японии используется грузовой корабль H-II (HTV). К 2017 году корабль выполнил шесть стыковок с МКС. Всего до 2020 года планируется осуществить 9 запусков.
Изучение новых миров
Отправляясь туда, где еще никто не бывал, эти роботизированные планетоходы являются нашими глазами и руками для исследования других планет
Ползающие, катящиеся, — а однажды, возможно, появятся и ходящие — по поверхности других миров, планетоходы предназначены для того, чтобы перемещаться по самым сложным ландшафтам и выдерживать самые враждебные условия, какие только есть в Солнечной системе. Знаменитый лунный автомобиль Lunar Roving Vehicle (LRV), управляемый космонавтами NASA в ходе последних миссий «Аполлон», является дальним родственником роботизированных планетоходов, которые начали раскрывать тайны Марса в конце 90-х годов, а однажды могут отправиться исследовать более далекие планеты и их спутники. Оснащенные сложными инструментами, они обеспечивают более дешевую и безопасную, пусть и менее гибкую, альтернативу участию человека в исследовании других миров.

Лунный автомобиль — вероятно, самое известное колесное транспортное средство, путешествовавшее по другому небесному телу, но настоящими предшественниками современных миссий с участием роботов были советские «Луноходы». Похожие на ванну на колесах с откидывающейся «крышкой» из солнечных панелей, два «Лунохода» работали на Луне в течение нескольких месяцев в начале 70-х годов. Тем не менее несмотря на этот успех, лишь в 1997 году другой планетоход — небольшой, но надежный робот NASA «Соджорнер» спустился на поверхность Марса. Успех «Соджорнера» открыл дорогу более крупным и амбициозным марсоходам «Спирит» и «Оппортьюнити», а затем и «Кьюриосити», а также запланированным миссиям, например, с участием марсохода ЕКА «Экзомарс», которая должна начаться в 2020 году.
Роботизированным планетоходам приходится справляться со множеством сложностей; находясь в миллионах километров от людей, способных им помочь, они должны передвигаться по сложному ландшафту, избегая поломок и опрокидывания. Конструкции, подобные «Кьюриосити», — размером с автомобиль — передвигаются на надежных колесах, каждое снабжено независимым двигателем и подвеской так, что если одно застопорится, другие продолжат работать. Чтобы посмотреть, как конструкция аппарата будет вести себя в условиях других планет, инженеры сначала тестируют ее в самых враждебных уголках Земли, например, в пустыне Мохаве недалеко от Долины Смерти в Калифорнии. На Земле команда инженеров использует «клон» марсохода для репетиции сложных маневров в безопасных условиях.
Роботы-разведчики располагают разнообразным оборудованием. Это погодные станции, массив камер, роботизированные руки, инструменты для взятия проб, а также оборудование для проведения химического анализа. Команды ученых на Земле изучают изображения окружающей планетоход среды и выбирают конкретные цели для исследования, но многие базовые операции планетоход выполняет автономно.
По сравнению с людьми, планетоходам не хватает гибкости, но это компенсируется их выносливостью. Получая энергию от солнечных панелей или радиоактивных изотопов, они могут работать месяцами и даже годами. Так, марсоход NASA «Оппортьюнити» спустился на поверхность в районе Плато Меридиана в январе 2004 года и, более чем 13 лет спустя, все еще работает.
Будучи правильно спроектированными, планетоходы могут противостоять опасностям, связанным с мощной радиацией и экстремальными перепадами температур и, конечно, им не нужная пища, вода или воздух для дыхания. В будущем многоногие конструкции «шагающих» планетоходов сделают наших механических дублеров более гибкими, еще сильнее сократив разрыв между роботами и людьми.
Поддержание связи с Землей
Отправка команд планетоходу, находящемуся в космосе, представляет собой отдельную проблему. Радиосигналы достигают Луны чуть более чем за секунду, но чтобы добраться до робота на Красной планете, может потребоваться от 3 до 22 минут, в зависимости от положения планеты на орбите.

Таким образом, если первые советские «Луноходы» могли управляться дистанционно лишь с небольшой задержкой, то в случае с марсоходами это невозможно; отправка каждой команды и оценка ее результатов займет слишком много времени.
Поэтому планетоходы, начиная с «Соджорнера» и «Кьюриосити» и заканчивая более поздними конструкциями, заранее запрограммированы на выполнение определенного набора функций, что позволяет им работать более или менее независимо; их операторы, находящиеся на Земле, выбирают направление путешествия и объекты для исследования, после чего марсоход может самостоятельно решать многие задачи.
Огромное расстояние до Марса требует большой мощности радиосигналов, но на марсоход непрактично устанавливать параболическую антенну с высоким коэффициентом усиления, направленную на Землю. Вместо этого марсоходы используют широковещательные радиоантенны для отправки сигналов на ретрансляционную станцию. Обычно это спутник, находящийся на орбите Марса, который затем с помощью параболической антенны передает сигналы на Землю. Однако в случае возникновения чрезвычайных ситуаций современные марсоходы способны осуществлять медленную коммуникацию непосредственно с Землей.
Бортовые технологии
На планетоходах может быть установлено различное оборудование для изучения грунта других миров. Мультиспектральные камеры, способные фотографировать объекты через различные цветные фильтры, могут рассказать много удивительного о минеральном составе окружающих пород, а спектрометры, которые регистрируют и анализируют спектр, получаемый при бомбардировке целевого объекта радиоактивными частицами, могут служить в качестве химических «снифферов» для определения сигнатур обнаруженных элементов и молекул.
По мере того как марсоходы становились все более сложными, совершенствовались и их возможности по взятию проб. Компактный мини-планетоход «Соджорнер» был способен исследовать только те породы, которые выступали на поверхности. Аппараты «Спирит» и «Оппортьюнити» уже были оснащены механизмом для измельчения горных пород и могли добираться до свежей породы, которую можно было бы изучать с помощью инструментов, встроенных в их роботизированные руки.
«Кьюриосити» и планируемый к запуску марсоход «Экзомарс» снабжены специальными бурами, позволяющими собирать образцы подповерхностных пород и передавать их во встроенные химические лаборатории для анализа. Время покажет, насколько успешной будет их работа.
Космический робот «Декстр»
Время от времени компоненты МКС приходится ремонтировать или перемещать для проверки. В конце 2010 года после двухгодичного периода испытаний был введен в эксплуатацию гибкий манипулятор специального назначения «Декстр».
Основная причина отправки ремонтного робота связана с потенциальной экономией времени космонавтов, которые смогут сосредоточиться на проведении научных экспериментов, а также с тем, что роботу не страшна радиация и другие космические опасности. «"Декстр” помогает снизить риск от микрометеоритов или проблем со скафандрами, которые угрожают космонавтам во время работы в открытом космосе», — говорит Дэниэл Рей, менеджер из Канадского космического агентства.

«Декстр» — это электрический робот. У него есть две электрически управляемые руки, каждая обладает семью степенями свободы. Каждый шарнир руки управляется отдельным микроконтроллером и запускает предустановленный компьютерный код. «Движения робота координируют центральные процессоры», — говорит Дэниэл, поясняя, что робот в основном управляется с Земли, но предполагается и некоторое автономное поведение. «Все шарниры представляют собой вращающиеся соединения, поэтому они должны двигаться скоординировано». Робот длиной 3,66 м и весом 1662 кг собирали на орбите. Этот колосс располагает четырьмя основными инструментами для проведения ремонта. Дэниэл описал две важные характеристики «Декстра», делающие его превосходным ремонтным роботом.
Во-первых, робот «Декстр» использует инверсный кинетический двигатель для управления движением шарниров. Слово «инверсный» означает, что шарнирам сообщаются параметры места, в которое они должны переместить ремонтный инструмент, после чего шарниры должны двигаться в обратном порядке, чтобы принять нужное положение. По словам Дэниэла, это похоже на то, как человек, которому сказали положить руку на дверную ручку, знает, что ему нужно переместить локоть, предплечье и плечо в соответствующее положение. Во-вторых, у робота есть датчик момента силы, который измеряет силы, приложенные к шарнирам, и используется для коррекции входных сигналов, полученных от космонавта, чтобы избежать ошибок и заедания шарниров.