Эмоциональные роботы
Если первым экземплярам роботов было достаточно поднять руку в знак приветствия и этим уже восхитить людей, то сегодня от них требуется проявление эмоций и умение вовремя их демонстрировать.
На лице у человека более 50 мышц, и практически все они участвуют в мимике. Роботов, которые имели бы такое же количество актуаторов, способных передавать эмоции, пока не существует. Но это не значит, что инженеры не стремятся создать машину, чья мимика была бы неотличимой от человеческой.
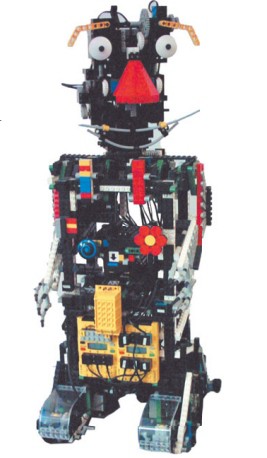
Филикс
Датская компания Lego в 1998 году создала достаточно простого робота, который, однако, может демонстрировать различные эмоции. Если Филикс во время движения сталкивается с какой-либо преградой, он реагирует на это с гневом, страхом либо выражает радость.

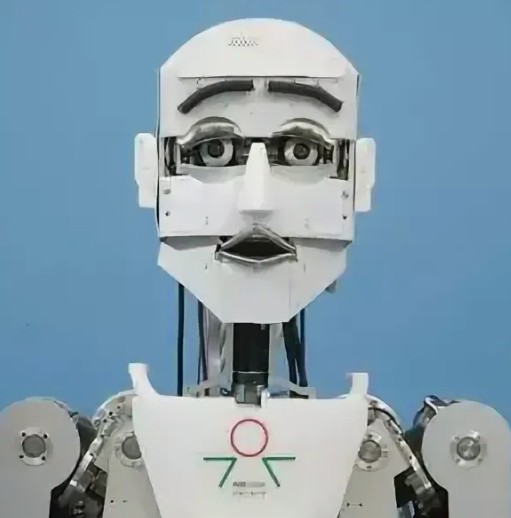
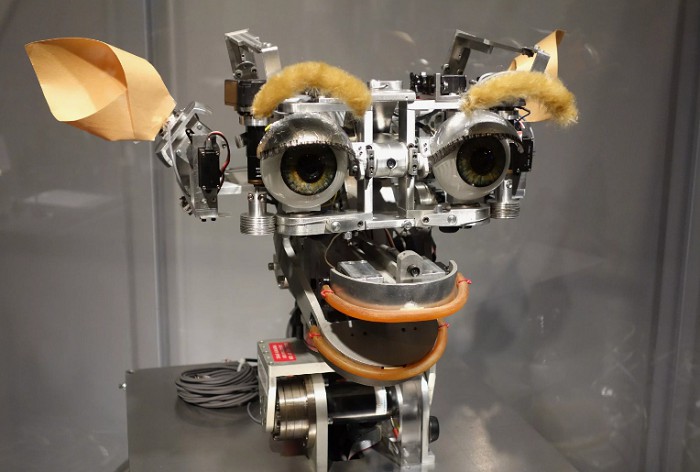
Кисмет
Робот Кисмет, созданный в конце 1990-х годов в Массачусетском технологическом институте, является одним из самых чувствительных устройств. Его слуховые, визуальные и выразительные системы предназначены для участия в социальном взаимодействии с людьми и моделировании человеческих эмоций и мимики.
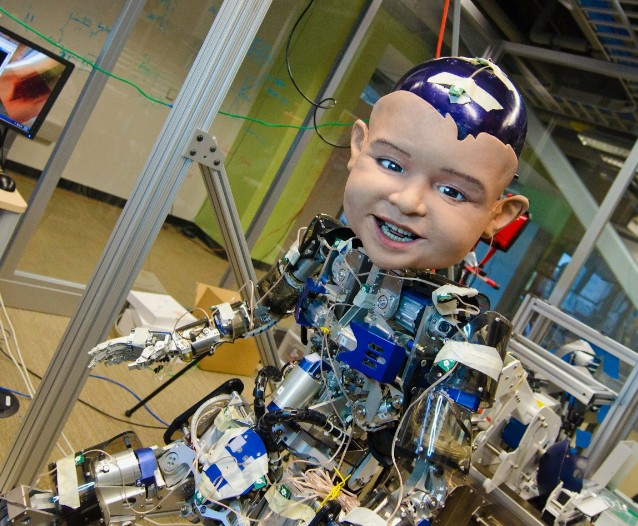
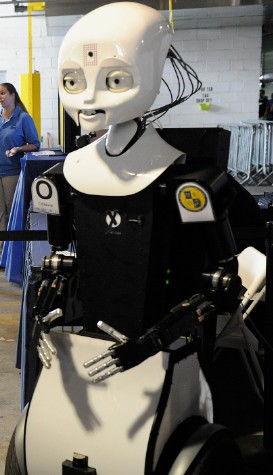
Бум «чувствующих» роботов
Кисмет дал начало буму разработок роботов, выражающих эмоции. Созданный в Университете Васэда робот WE-4 может «чувствовать» запахи: например, он выражает недовольство, когда ощущает запах сигарет. Роботы, демонстрирующие эмоции, интересны не только университетам, но и производителям игрушек. Еще в 2000 году в США был выпущен My real baby — робот, внешне похожий на младенца. Кукла, в которой заложено 15 эмоций, понимала, когда ее кормили, качали или игнорировали, и реагировала на это соответствующим образом. В зависимости от настроения у нее менялись голос и выражение лица.