Роботы в космосе
Сегодня роботы в космосе — привычный и общеизвестный факт.
Освоение космоса без роботов невозможно. Причин этого немало: машины обходятся без воздуха, менее чувствительны к крайне низким и высоким температурам, для их деятельности не нужно строить за пределами нашей планеты целые жилые комплексы, да и возвращать их на Землю необязательно.

Спутники
Освоение космоса началось с роботов: 4 октября 1957 года СССР запустил на орбиту «Спутник-1». В течение нескольких дней он посылал радиосигналы, услышать которые могли радиолюбители в любой точке Земли. Успешный запуск положил начало масштабным научным разработкам и покорению космоса. За следующие 60 лет на орбиту были выведены сотни спутников. Сегодня спутники делятся на несколько видов: астрономические предназначены для исследования космоса, метеорологические — для наблюдения за климатом Земли, биоспутники — для проведения экспериментов над живыми организмами. Без спутников связи не было бы интернета и сотовых телефонов, без навигационных спутников — систем глобального позиционирования вроде GPS и ГЛОНАСС.
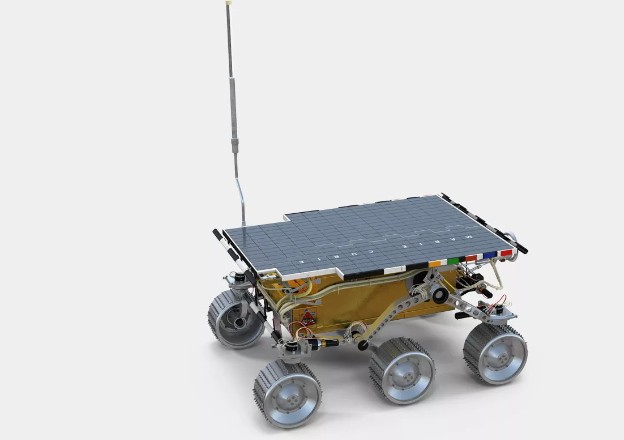
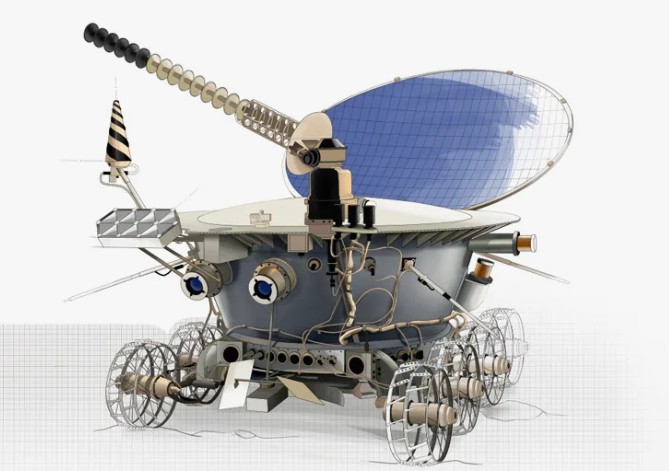
На Луне
В сентябре 1959 года советский аппарат «Луна-2» впервые достиг поверхности Луны. Так началось изучение спутника Земли, однако исследования затруднялись тем, что сигналы от оператора к устройствам шли несколько минут. Был необходим робот, который мог бы самостоятельно двигаться и выполнять необходимые действия на поверхности Луны. И он появился. Это «Луноход-1», запуск которого был осуществлен в 1970 году. Аппарат, снабженный солнечной панелью, получал команды от операторов.
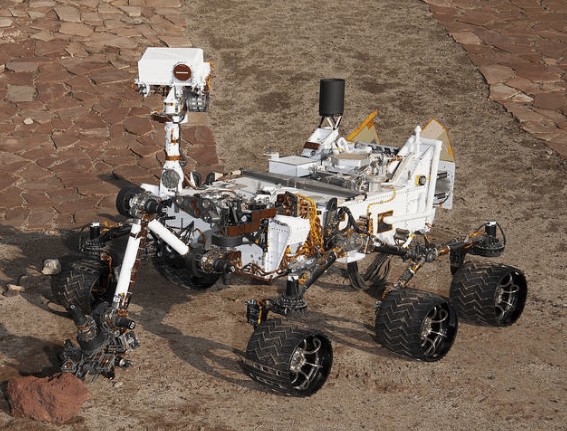
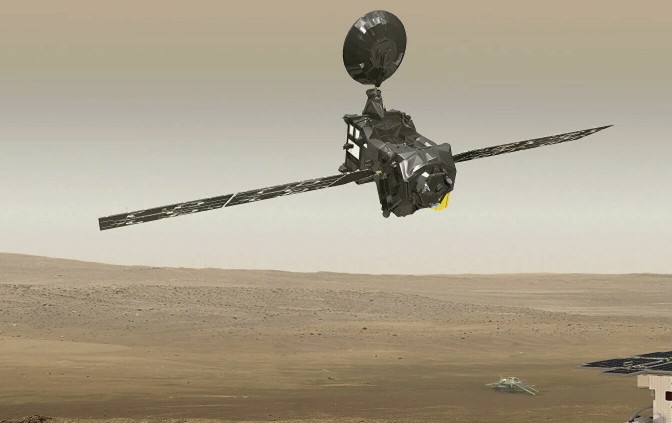
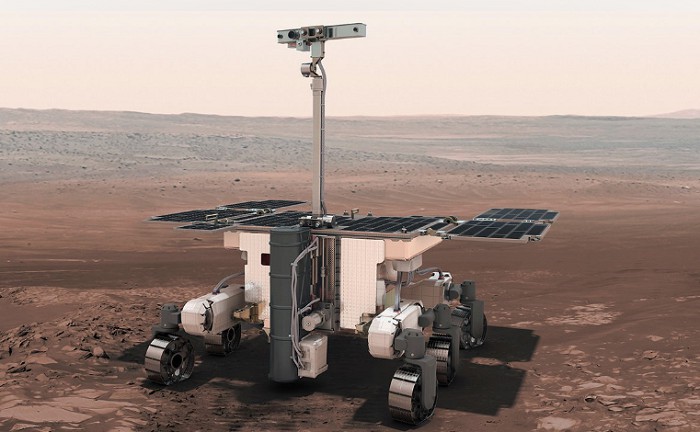
На Марсе
Снимки планеты проводятся с 1960-х годов, а в 1976 году к Марсу был направлен « Викинг-1», который стал первым космическим аппаратом, успешно севшим на его поверхность и выполнившим программу исследований. Сейчас на Марсе работают два марсохода, а вокруг планеты летают шесть действующих искусственных спутников.

На космических станциях
Не обошлось без роботов и на космических станциях (КС). Модули КС «Мир» были оборудованы ляппами — крупными манипуляторами, применяемыми во время сборки на орбите, а также позволяющими изменять положение модулей станции. На МКС при выполнении внешних работ используется «Канадарм-2». Для бытовой помощи астронавтам внутри станции разрабатывается сразу несколько моделей.

Робонавт
Роботы становятся привычными не только на земле, но и за ее пределами. Разработанный НАСА и «Дженерал Моторс» Робонавт с 2011 года находится на международной космической станции, помогая астронавтам в выполнении повседневных задач (например, в уборке станции) и ликвидации аварийных ситуаций (пожаров или утечек). Первые прототипы Робонавта появились еще в 1996 году, но конечный вариант был представлен только 14 лет спустя.
Робонавт призван стать помощником астронавтов и выполнять работу как внутри станции, так и в открытом космосе. Он умеет писать, захватывать и складывать вещи, а также поднимать тяжести (на Земле робот способен удержать предмет до 2,3 килограмма).
