Что чувствует робот
Настоящий робот должен слышать и видеть — этому принципу следовали многие инженеры во времена становления робототехники.
Обучение машин навыкам видеть, слышать, чувствовать, понимать, где они находятся, — одна из самых сложных задач современной робототехники. Наука успешно справляется с ней, но сравниться с человеком роботы пока не могут.
Видеть и слышать
Первые «чувствительные» роботы появились еще в 1920-х годах: некоторые экземпляры могли слышать и различать голосовые команды, подаваемые через телефонные трубки. Умение видеть машины приобрели после того, как на них установили светочувствительные датчики, а затем видеокамеры.
Ощущать и понимать
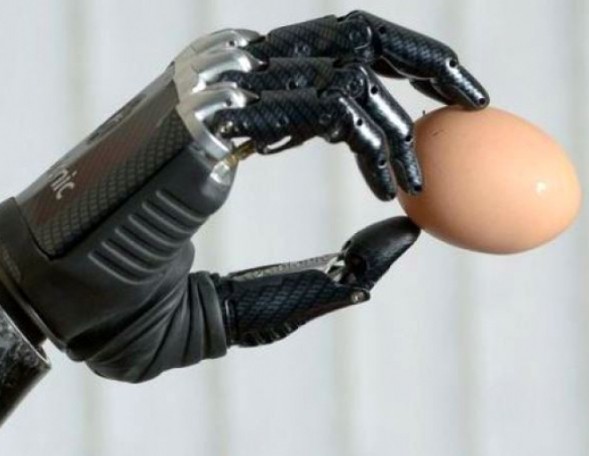
Тело человека или животного покрыто кожей, в которой находятся нервные окончания, которых у роботов, разумеется, нет. Поэтому они не могут быть настолько чувствительными, как люди. Машины ощущают прикосновения только в местах, где установлены датчики. И если кошки используют свои усы в качестве инструмента ближнего ориентирования, то роботам для этого необходимы специальные сенсоры.
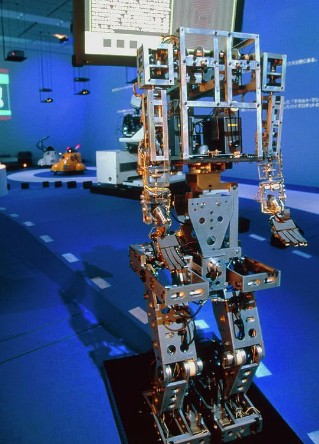
Первые успешные попытки обучить роботов другим чувствам произошли в 1970-е годы. Японский Wabot-1 первым стал различать прикосновения благодаря системе датчиков и сенсоров. Опыт быстро переняли другие инженеры, научив свои изобретения чувствовать касания и реагировать на них. Это позволило улучшить навигацию машин: теперь они могли обходить препятствия.
Многие научные и промышленные роботы обладают обонянием: одни могут самостоятельно вызвать помощь при задымлении помещения, другие — измерить количество вредных веществ в воздухе. Некоторые инженеры пытаются разработать устройства, которые могли бы справляться с узким кругом задач, например находить по запаху трюфели.
Новые технологии
На смену бытовым видеокамерам и телефонным трубкам давно пришли новые технологии, позволяющие управлять роботами голосом либо дающие им возможность самостоятельно разрабатывать алгоритм действий в зависимости от поставленной задачи и окружающей среды. Современные устройства обладают гораздо более лучшим зрением и чутким слухом, чем человек. Они могут видеть в полной темноте, реагировать на малейшие звуковые вибрации, чувствовать даже самые незначительные изменения температуры воздуха, распознавать нужный запах из сотни.
Как работают органы чувству роботов
- Для визуализации объектов служат лазерное сканирование и эхолокация. Робот направляет луч или звуковую волну и по времени пути отраженного сигнала определяет расстояние до объекта. Вот почему возможно построение карт местности, по которым робот может двигаться, не натыкаясь на препятствия.
- Тактильные ощущения робот получает благодаря сенсорам, которые реагируют на прикосновение. В некоторых случаях они имеют вид волосков на теле, направленных в разные стороны: это позволяет строить объемные модели пространства вокруг робота.
- Сложнее всего с обучением роботов различать запахи и вкусы: каждое конкретное изобретение направлено на определенные цели, а потому универсального способа, подходящего для большинства разработок, пока не существует.

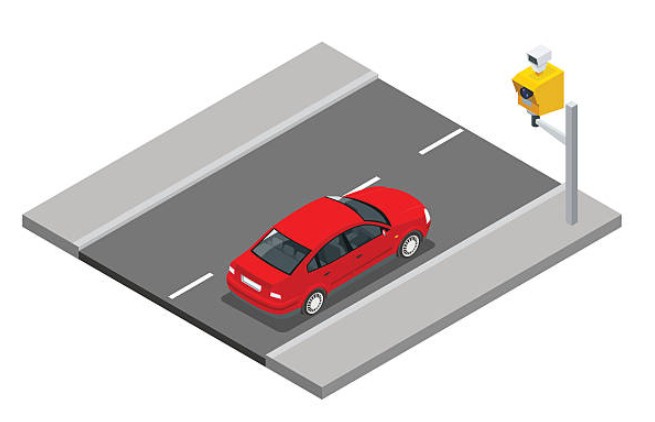
Роботы-поводыри
Роботы вполне могут заменить собак в качестве поводырей. Уже используются модели, которые способны перевести человека через дорогу, — они учитывают расстояние до автомобилей, скорость движения транспорта и пешехода, наличие искусственных неровностей и т. д. Такие устройства взаимодействуют с человеком посредством звуковых сигналов, а скорость их передвижения координируется с темпом ходьбы владельца.