Эволюция андроидов
Представление о том, каким должен быть человекоподобный робот, менялось в зависимости от предполагаемых функций. Если в первой половине XX века большинству создаваемых роботов было достаточно двигать руками и сгибать пальцы, то в послевоенное время им начали находить более практическое применение.
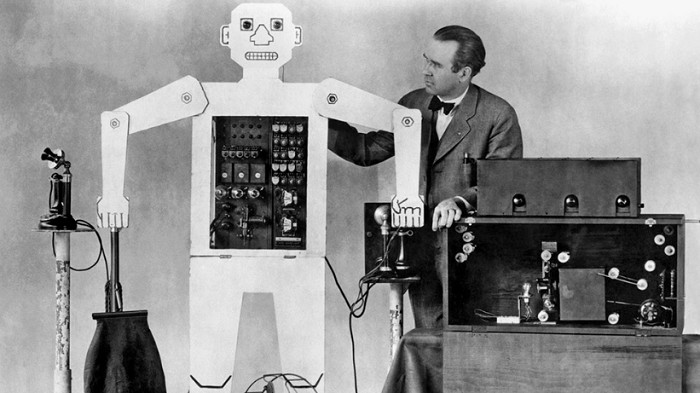
Мистер Телевокс. Главной особенностью робота, появившегося в 1927 году и ставшего прототипом автоответчиков, была возможность брать трубку телефона. Позже Мистер Телевокс научился открывать двери, сообщать по телефону уровень воды и скорость потока в водохранилище. Языком робота были сигнальные гудки, поэтому для преобразования человеческого голоса использовались телефонная трубка и камертоны. Внутри устройства располагались реле, чувствительные к звукам определенной высоты.
Их переключения становились сигналом роботу к выполнению тех или иных действий

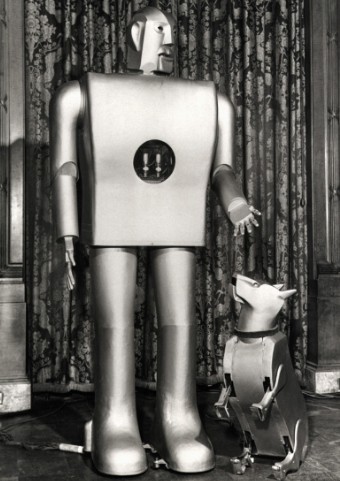
Альфа. В 1932 году инженер Гарри Мэй создал устройство, управление которым осуществлялось голосовыми командами. Робот двигал частями тела, мог вставать и садиться, но главное — стрелять из револьвера. Два года спустя изобретатель представил женоподобную версию
Электро и Спарки. Эти роботы (годы создания 1939-й и 1940-й соответственно) были настоящими звездами шоу-бизнеса: выступали на многочисленных мероприятиях, снимались в рекламе и даже в кино. Сейчас они выставлены на показ в Мансфилде (Огайо, США)
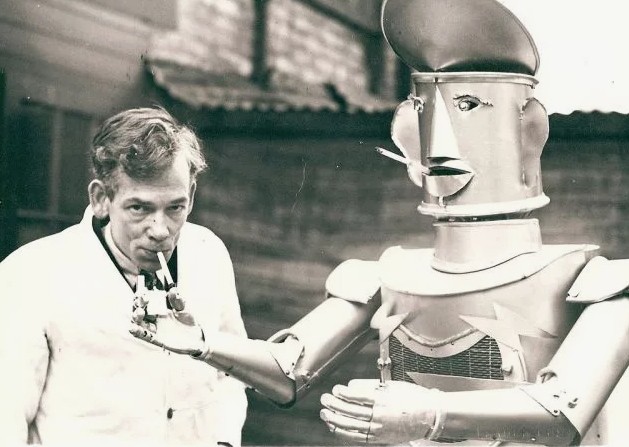
Робот Чарльза Лоусона. О разработанной в 1939 году машине известно немного.
Робот мог выполнять функции регулировщика движения, но данных, подтверждающих этот факт, не сохранилось.
Почти на всех фотографиях робот либо курит сам, либо поджигает сигарету желающим: видимо, в те годы это умение ценилось выше всего
Роберт. Робот был представлен в 1954 году как домашний помощник: он мог двигать руками, перемещаться, вставать и садиться, а потому создатели посчитали, что он справится и с простыми бытовыми обязанностями

Тинкер.
Собранный в 1966 году Деннисом Уэстоном робот мог выполнять 180 движений.
Для этого использовались 120 моторчиков, камера, память и 29 каналов для приема и перенаправления сигналов.
На фотографии Тинкер моет машину своего создателя

Сабор V. Работа по созданию радиоуправляемого робота была начата в послевоенной Европе, а его первое появление на публике состоялось в 1952 году. Во время турне по Европе пресса дала ему новое имя — Луис
Клаус Шольц и его роботы ММ7 (слева) и ММ8. Изобретатель работал над своими созданиями с 1957 по 1973 год. Благодаря удаленному управлению роботы могли открывать двери, пылесосить пол и приносить чай

Артур. Робот был создан в 1981 году с единственной целью — выгуливать собак
Поделиться ссылкой