Роботы-спасатели
Представьте себе область разрушительного землетрясения или природного катаклизма, такого, как катастрофа в Фукусиме или на Гаити. Пострадавший человек завален обломками. Через некоторое время темноту пронизывает яркий луч прожектора, слышится приближающийся шум гидравлики и моторов, а затем обломки благополучно растаскиваются спасателем — не человеком.
Достижения в области робототехники заставляют многих экспертов предсказывать ближайшее будущее, когда в зонах бедствия будут широко использоваться спасательные роботы. Но успех таких операций зависит от соблюдения некоторых важных требований.
Робот, работающий в опасных условиях, должен управляться автономно. Зачастую такие роботы — очень тяжелые устройства, требующие мощных источников питания. Чем более мощные аккумуляторы используются, тем тяжелее роботы, а, следовательно, тем больше энергии они требуют, и так далее. Решения проблемы снабжения энергией различны. Робот «БигДог» компании Boston Dynamics оборудован одноцилиндровым двухтактным двигателем Go-Kart (похожие используются в газонокосилках), который, в свою очередь, приводит в движение 16 гидромоторов в ногах. Марсоход «Оппортьюнити» космического агентства NASA теоретически может продолжать исследовать марсианские кратеры бесконечно (при условии работоспособности механизмов), поскольку заряжает свои аккумуляторы с помощью солнечной панели.
При проведении всемирных робототехнических соревнований участники не могут быть связаны с внешними источниками питания или коммуникациями, а при самых строгих условиях тестирования специально глушится даже беспроводная связь, чтобы дать роботам шанс продемонстрировать свои возможности в автономном режиме. Хотя кажется, что это слишком жесткие условия, город, разрушенный при смертоносном землетрясении, или лес, охваченный пламенем, поставит перед роботами гораздо более сложные задачи. Поисково-спасательные боты должны будут проникнуть вглубь опасной территории без связи с операторами. Они должны будут самостоятельно принимать решения о том, что делать дальше, используя машинное обучение и другие алгоритмы искусственного интеллекта.

Дополнительное программирование роботов для работы в непредсказуемых условиях — невероятно сложная задача, но и оставлять робота без специальной подготовки было бы неразумно. Существует точка максимальной эффективности, которую можно определить, и «научить робота отучиваться» от определенных алгоритмов поведения, что может быть важно в условиях чрезвычайной ситуации. Не следует излишне ограничивать возможность самообучения, так как простейшее препятствие может стать фатальным камнем преткновения, например, лестничный пролет или дверная ручка. В свою очередь, слишком высокий уровень свободы самообучения может привести к тому, что робот решит, что жертва стихийного бедствия — один из обломков, и причинит еще больше вреда.
Другим секретом успешного проведения поисково-спасательной операции являются датчики, которых существует огромное количество для разных ситуаций. С учетом измерений акселерометров или гироскопов в нескольких плоскостях, датчики движения предоставляют роботу крайне важную информацию, такую как положение на поверхности земли — полезные сведения при движении по развалинам. Он может получать информацию о своем перемещении и от датчиков распределения нагрузки, которые измеряют смещение веса. Моторы, также называемые приводами, впоследствии компенсируют смещения, перемещая корпус в противоположном направлении, чтобы робот оставался в вертикальном положении. Для роботов, которые передают данные операторам в безопасной зоне, крайне важны визуальные датчики. Камеры — часто две, чтобы передать глубину, — могут показать оператору, что происходит рядом с роботом.
Разрабатываются роботы с датчиками опасных веществ (условий), с которыми они могут столкнуться в тех или иных ситуациях. Робот «Джеминай-Скаут» компании Sandia National Labs предназначен для поиска и спасения людей (и доставки им продовольствия) при техногенных катастрофах. Робот может перемещаться по неровным поверхностям, мусору и даже воде и грязи. Он оборудован тепловизором для передачи видеоизображения, динамиком и микрофоном для связи, а также датчиками температуры и взрывчатых и угарных газов, чтобы определять безопасность пути для спасателей. Вся электроника «Джеминай-Скаута» упакована во взрывобезопасный кожух, поэтому если даже произойдет авария и робот выйдет из строя, его электроника будет максимально защищена и не даст искры, которая может вызвать взрыв и усложнить спасательную операцию.

После разрушений, вызванных крупными катастрофами, путь к месту нахождения пострадавших может быть затруднен и требовать постоянной коррекции веса и балансировки, что мы, люди, делаем, не задумываясь. Колесные ходовые части тоже имеют ограниченные области применения. Конструкции, на создание которых разработчики были вдохновлены четвероногими животными, такие как «БигДог» и «Чита» компании Boston Dynamics, также перспективны.
Хотя роботы-гуманоиды кажутся наиболее подходящими, движения, необходимые для работы на территории, усыпанной обломками, чрезвычайно сложны. Даже сохранять вертикальное положение — это трудная задача для процессора и приводов робота, поскольку они пытаются имитировать мозг и мышцы человека.
Поисково-спасательные роботы дебютировали в 2001 году, когда были отправлены в невероятно сложное место обрушения башен Всемирного торгового центра после терактов 11 сентября. Их работа была не очень эффективна, они часто застревали и ломались, но проверка в полевых условиях предоставила инженерам множество информации для разработки спасательных роботов следующего поколения.
Но было бы неразумно тратить все время и средства на разработку одной машины — потом может оказаться так, что робот будет завален обломками стены или остановится из-за севшего аккумулятора в самый неподходящий момент и будет утерян безвозвратно. Для предотвращения таких ситуаций следует придерживаться простого правила — не нужно класть все яйца в одну корзину. Решением для некоторых ситуаций может служить армия спасательных роботов, работающих в команде.
Использование группы роботов имеет несколько преимуществ. Если на месте катастрофы много больших бетонных или металлических обломков, связь с операторами, вероятно, будет очень нестабильна, поэтому, если утерян контакт с определенным роботом, связь с ним можно поддерживать через цепочку роботов, которые находятся в зоне досягаемости передатчиков. Группа роботов также позволяет распределить работы на месте катастрофы. Каждый выполняет свое задание, но может взять на себя обязанности любого другого робота, если с тем что-то случилось, или по инструкции оператора. Это несколько напоминает использование одного гигантского робота с мозгом, состоящим из отдельных элементов.

Участники группы роботов не обязательно должны быть одинаковыми. Могут быть развернуты роботы разного типа, каждый с собственными умениями. Крупные, рассчитанные на прохождение длительных маршрутов роботы могли бы унести меньшие и более специализированные устройства, такие как змееподобные роботы, далеко в зону бедствия, чтобы те смогли выполнить свою работу.
Одна из моделей змееподобного робота, разработанная японским профессором робототехники Сатоши Тадокоро, составляет в длину почти восемь метров и двигается с помощью нейлоновых щеток, управляемых крошечными отдельными моторчиками. Робот ползает со скоростью пять сантиметров в секунду, может подниматься на склоны под углом 20º, поворачивать под острым углом и передавать изображение с фронтальной камеры. Эти маломощные змееподобные роботы создавались для работы на небольших территориях, но модели повышенной дальности могли бы исследовать сгоревший завод или разрушенное здание, зафиксировать разрушения и передать информацию операторам.
Вне зависимости от формы и размера, поисковые и спасательные роботы будущего будут сопровождать спасателей и помогать людям в опасных условиях, или, быть может, даже работать автономно, не подвергая людей-операторов опасности.
Радиационная авария на АЭС Фукусима-1
Территория рядом с атомной электростанцией Фукусима-1 в Японии стала непроходимой, после того как в марте 2011 года мощное цунами привело к отказу оборудования. Генераторы стали неспособны произвести достаточно энергии для обеспечения питанием насосов охлаждающей жидкости, реакторы были повреждены и радиоактивные вещества попали в окружающую среду, в том числе в океан.
Два гусеничных «Варриора» американской робототехнической компании iRobot использовались для вакуумной сборки радиоактивной пыли в резервуар, прикрепленный к манипулятору, и могли поднимать обломки весом до 90 кг. Робот «Пакбот» той же компании, который применялся в саперных работах в Ираке и Афганистане, был оборудован инновационной ходовой частью с колесами-«флипперами» и полным набором инструментов для определения уровня радиации, температуры и кислорода. Два «Пакбота» отправились вглубь разрушенных зданий, передавая видеоизображение и перемещая обломки весом до 14 кг.
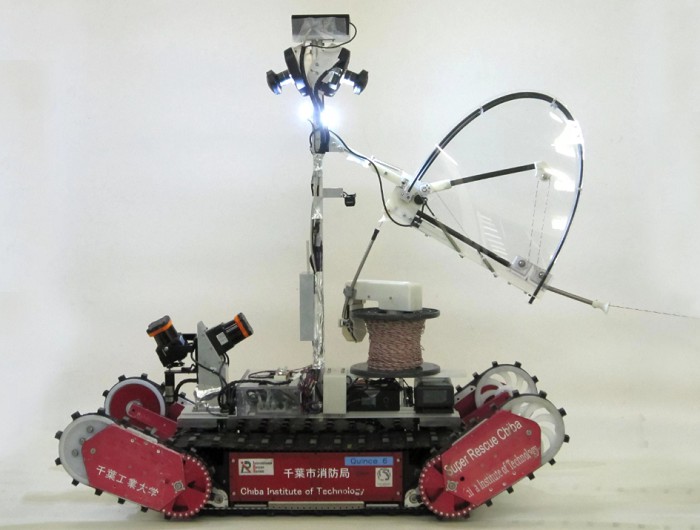
В исследовании атомной электростанции принимают участие и роботы «Квинс», разработанные Технологическим институтом Чибы. Особенность «Квинса» в специальной конструкции ходовой части, позволяющей ему двигаться по неровной поверхности и спускаться/подниматься по лестнице. Управление водонепроницаемым роботом, собирающим образцы материалов и ведущим мониторинг уровня радиации, велось с расстояния более двух километров.
Ограниченные ресурсы робота
Люди могут заниматься делами целый день, получив энергию всего за несколько приемов пищи, а механические помощники пока не могут похвастаться такой энергетической эффективностью и выносливостью. Люди быстро адаптируются, благодаря чему приобретают самые разнообразные способности. Несмотря на то, что роботы опережают людей по некоторым критериям, таким как устойчивость к воздействию опасных веществ, дальность видения и создание детальных схем помещений, они, как правило, оптимизированы для решения проблем определенного типа, а обучение их новым навыкам требует использования дорогостоящей техники и сложного программирования.
Роботы не способны инстинктивно защищаться от опасностей так, как это делаем мы, без осведомленности о ситуации и обстановке, если это не запрограммировано предварительно. Это важно в поисково-спасательных миссиях, связанных с постоянным присутствием опасности. В будущих спасательных операциях, вероятно, люди и роботы будут работать совместно, чтобы дополнить навыки и возможности друг друга.